layout: page mathjax: true title: “Internal” date: 2022-06-04 12:00:00 author: “Aman Chadha, Vinija Jain” —
- Catch all links
- ChatGPT vs GPT3
- Generating music with text or images
- Stable Diffusion
- ML Youtube channels
- DALLE-2
- Forward-Forward Algorithm
- ChatGPT
- ML for Ads Ranking RecSys
- Is PageRank still used at Google
- CLIP
- Quick Feature Selection Method
- Overfitting
- Pruning
- Information Retrieval Metrics
- XGBoost
- Data Parallelization by Sebastian Raschka
- Top 5 basic checks when trianing deep learning models
- A list of 5 techniques to optimize deep neural network model performance during inference
- Links for MLOPS
- Architecture
- Recommender Engine
- How to detect Data Drift
- Prevent data drift
- Explain reasoning behind offline and online gap in ML system evaluation and mitigation strategies?
- How do wide and deep models handle feature crossing in recommender systems?
- How to decompose Bias and Variance from the Data
- Feature Selection Method
- For typical recommendation system, a common practice is to continuously train the model. Suppose that we launched a 6 model ago and we have continuously trained it. Consider that if we trained a month starting off with the 6 month ago checkpoint and trained with 3 months of fresh data. How do we use the production model to make the new model with 3 months of data better?
- How are ID features handled in LLM recommender models?
- Self Instruct aligning language models with self generated instructions
- How do you handle hashing for a large billion-scale ID cardinality?
- What kind of feature crossing techniques in recommender systems?
- ANN and it’s selection criteria
- How do we handle categorical features in recommender systems?
- Is there any downside to Feature Hashing (Hashing Trick)?
- How do wide and deep models handle feature crossing in recommender systems ?
- Deep and Cross
- What does feature crossing mean? how do you handle high cardinality in data when crossing?
- For a recommender system’s training data, say we have 100M data samples, 5000 for retrieval, 5 for ranking. For the ranking stage, we want to log features. How best do we log for features since the ones that didn’t get to ranking could also be relevant?
- How do we compress features being stored for retrieval and ranking given space would be an issue?
- Tell me Deep and Cross vs Deep and Wide and draw the architecture in ascii, comparative analysis and focus on sparse,dense features and feature crossing
- Train Validation Test split
- Why you cant tune Hyperparameters on train
- L1 vs L2
- To Answer
Catch all links
“Machine Learning it JUST statistics!”. Sure! But before you go, can you answer the following questions?
- Why finding a set of weights for a Neural Network so that the network produces the correct output for all the training examples is a NP-hard problem? http://authors.library.caltech.edu/26705/1/88-20.pdf
- Why the Feature Selection problem is a NP-complete problem? https://www.aaai.org/…/Fall/1994/FS-94-02/FS94-02-011.pdf
- Why the Hyperparameter Optimization problem is NP-complete? https://www.cwu.edu/…/Hyperparameter%20Optimization…
- How would you implement Logistic Regression in a distributed manner? http://proceedings.mlr.press/v28/gopal13.pdf, https://link.springer.com/…/10.1007/978-981-15-1899-7_20
- What are the pros and cons of an Iterative Re-weighted Least Square implementation over a Gradient Descent implementation for a Logistic regression? https://nlp.chonbuk.ac.kr/BML/slides_freda/lec7.pdf
- How do you efficiently design a parallelized implementation of a Gradient Boosting Algorithm? https://www.kdd.org/kdd…/papers/files/rfp0697-chenAemb.pdf
- What are the trade-offs to build the trees in breadth-first-search (BFS) manner vs a depth-search-first (DFS) manner for a Random Forest algorithm? https://arxiv.org/abs/1910.06853
- How to modify the breadth-first-search algorithm to build efficient KD-trees for K-nearest neighbors? https://en.wikipedia.org/wiki/Best-first_search https://citeseerx.ist.psu.edu/viewdoc/download…
- Why the algorithms to parallelize on GPUs are slightly different from the ones to parallelize on CPUs? https://www.researchgate.net/…/4202315_Artificial…
- What is the effect of precision (e.g. float16 vs float32) in training Neural Networks? https://arxiv.org/abs/1502.02551, https://arxiv.org/abs/1412.7024, https://arxiv.org/abs/1602.02830
- How do you implement Logistic Regression on a quantum computing unit? https://arxiv.org/abs/1906.03834
- What is the best way to deploy a ML model on Kubernetes so you minimize latency while keeping modularity and maintainability high? https://www.analyticsvidhya.com/…/deploying-ml-models…/ https://opensource.com/…/9/deep-learning-model-kubernetes
- Why can Logistic Regression can perfectly learn the outcomes of a AND and OR logical gate but not from a XOR logical gate? https://web.stanford.edu/…/23-LogisticRegression.pdf https://courses.engr.illinois.edu/…/Slides/Lecture20.pdf
- What are the pros and cons of using Dynamic programming VS Monte Carlo methods to optimize the Bell equations? https://www.cs.hhu.de/…/Dialog…/Lectures_RL/L2.pdf https://richard-warren.github.io/blog/rl_intro_1/
- Why the Temporal-difference Learning method leads to more stable convergence of the Reinforcement learning algorithms? https://web.stanford.edu/…/pdphandbook/handbookch10.html Now that you answered those questions (or tried to!), can we take a minute now to appreciate the absurdity of the initial claim in this post? Thank you! —- Subscribe to my Newsletter to learn something new every week: https://TheAiEdge.io/ #machinelearning #datascience #statistics
ChatGPT vs GPT3
- What is it about ChatGPT we get so impressed by? GPT-3’s output is no less impressive but why does ChatGPT’s outputs feel “better”?
- The main difference between ChatGPT and GPT-3 is the tasks they are trying to solve.
- GPT-3 is mostly trying to predict the next token based on the previous tokens, including the ones from the user’s prompt, where ChatGPT tries to “follow the user’s instruction helpfully and safely”.
-
ChatGPT is trying to align to the user’s intention (https://lnkd.in/g_PA_8Xc). That is the reason InstructGPT (ChatGPT’s sibling model) with 1.3B parameters gives responses that “feel” better than GPT-33 with 175B parameters.
- ChatGPT is simply a GPT-3 model fine-tuned to human generated data with a reward mechanism to penalize responses that feel wrong to human labelers.
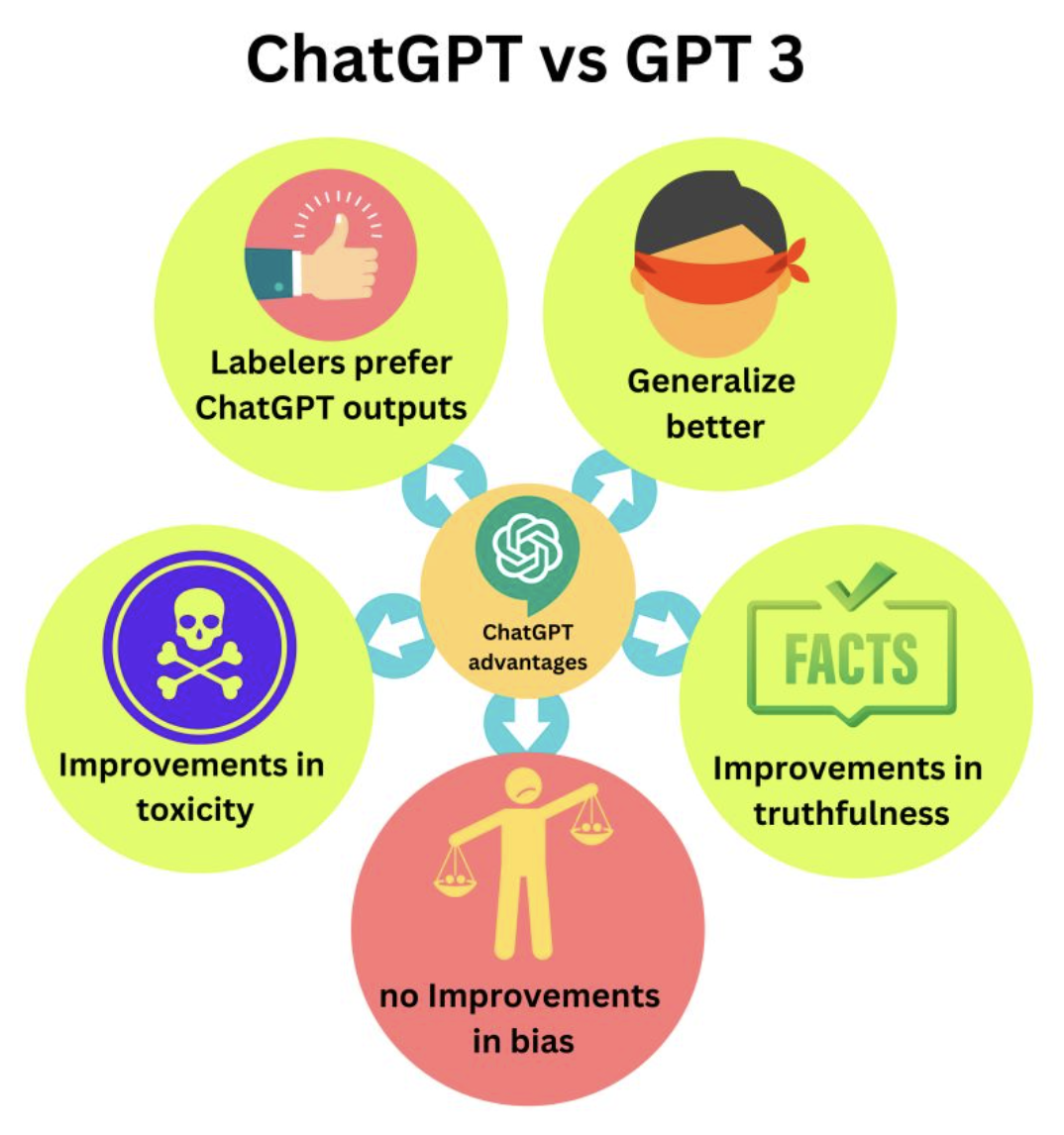
- They are a few advantages that emerged from that alignment training process:
- ChatGPT provides answers that are preferred over the ones generated by GPT-3
- ChatGPT generates right and informative answers twice as often as GPT-3
- ChatGPT leads to a language generation that is less toxic than GPT-3. However ChatGPT is still as biased!
- ChatGPT adapts better to different learning tasks, generalize better to unseen data, or to instructions very different from the ones found in the training data. For example, ChatGPT can answer in different languages or efficiently code, even then most of the training data is using natural English language.
-
For decades, language models were trained trying to predict sequence of words, where the key seemed to be in training to align to user’s intent. It seems conceptually obvious, but it is the first time that an alignment process is successfully applied to a language model of this scale.
- All the results presented in this post come from the InstructGPT article (https://lnkd.in/gnt9K9pu), and it is a safe assumption that those results carry to ChatGPT as well.
Generating music with text or images
- Imagine if you could tell a ML model “play a funk bassline with a jazzy saxophone” and it would synthesize artificial music! Well actually, you don’t need to imagine, you can just use it!
-
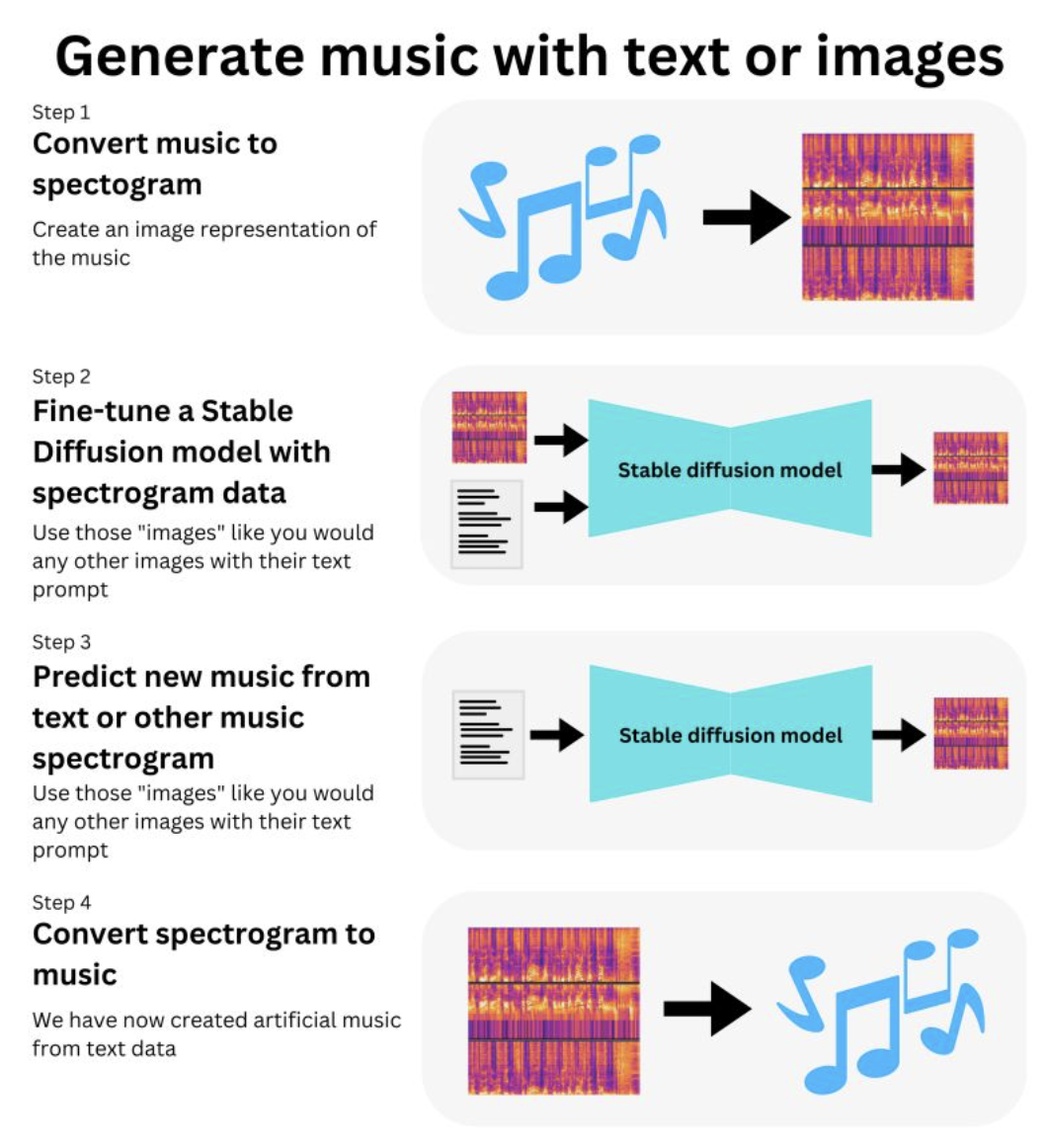
Introducing RIFFUSION, a Stable Diffusion model trained on Spectrogram image data: https://lnkd.in/ge9_VE6t. The idea is simplistic:
- just pick a pre-trained Stable Diffusion model (https://lnkd.in/dpFheWYS)
- Take lot of musics with their text descriptions and convert that into Spectrogram image data
- Fine-tune to the Stable Diffusion model
=> you now have a model that can predict new spectrograms based on other spectrograms or text prompts. Just convert those spectrograms back to musics.
If you want more details on how to do it yourself you can follow the process here: https://lnkd.in/gpj_K-UF. I discovered this website yesterday through Alpha Signal’s weekly summary: https://alphasignal.ai/. If you to learn more about stable diffusion, you can read my LinkedIn post on it: https://lnkd.in/gxBiU9fB
Stable Diffusion
- What is STABLE DIFFUSION? It is similar to DALL-E 2 as it is a diffusion model that can be used to generate images from text prompt.
- As opposed to DALL-E 2 though, it is open source with a PyTorch implementation (https://lnkd.in/dPpjtr-d) and a pre-trained version on HuggingFace (https://lnkd.in/dpFheWYS).
-
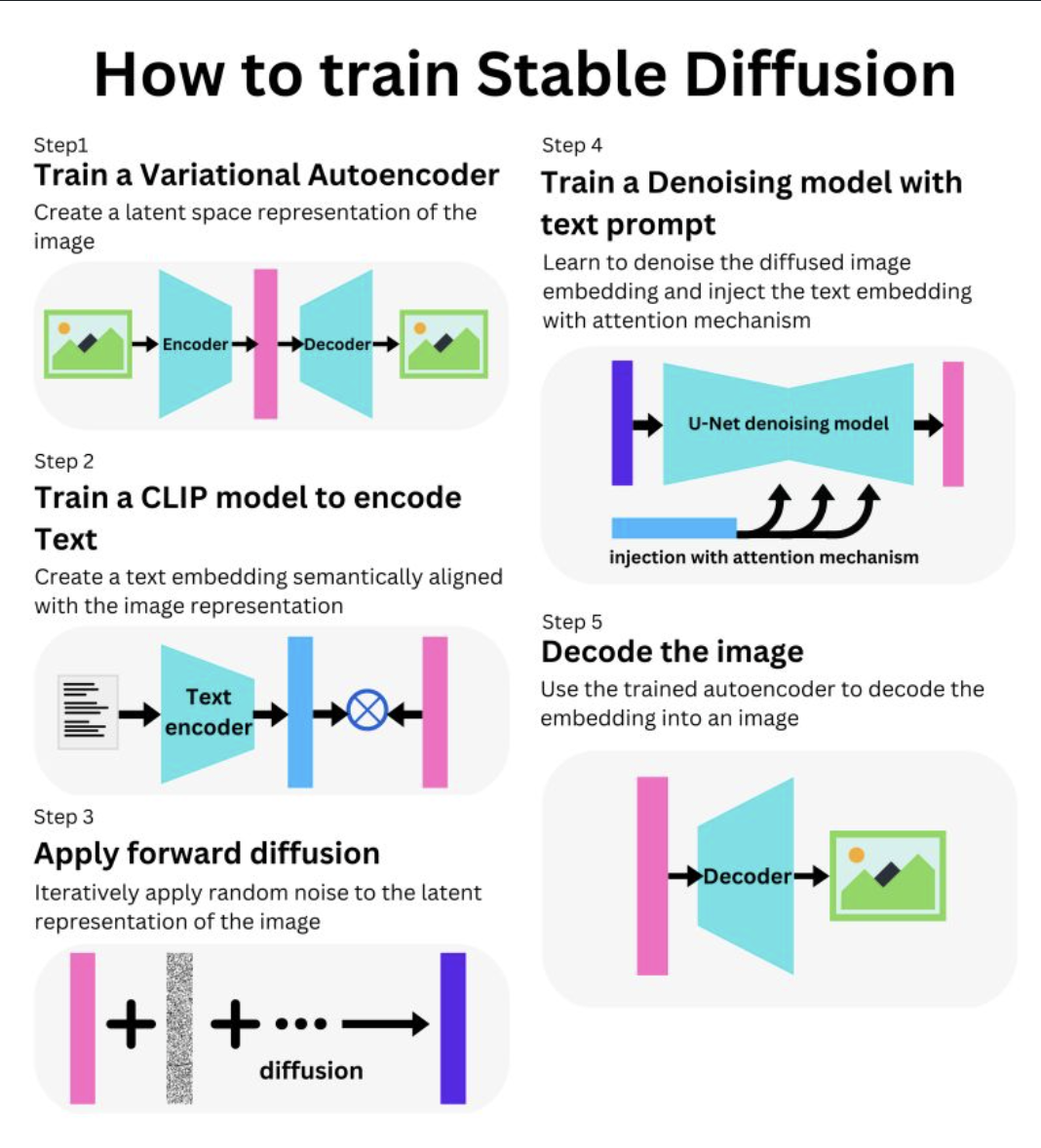
It is trained using the LAION-5B dataset (https://lnkd.in/gewm6VEV). Stable diffusion in composed of the following sub-models:
- We have an autoencoder (https://lnkd.in/dyzQgDXH) trained by combination of a perceptual loss (https://lnkd.in/dPqz68Tp) and a patch-based adversarial objective (https://lnkd.in/dJMX3ugX).
-
With it, we can encode an image to a latent representation and decode it from it.
-
A random noise is progressively applied to the embedding (https://lnkd.in/dq2ZUKmj). A latent representation of a text prompt is learned from a CLIP alignment to the image representation (https://lnkd.in/eGNMirji).
- We then use U-Net, a convolutional network with ResNet blocks to learn to denoise the diffused embedding (https://lnkd.in/dBppaqVK).
- The textual information is injected through cross-attention layers through the network (https://lnkd.in/dWsrEkpD).
-
The resulting denoised image is then decoded by the autoencoder decoder.
- The process is described here: https://lnkd.in/d4NijqmG and one of the best explanation on Stable Diffusion here: https://lnkd.in/dpWMm_kS. Fun model!
How to generate animation with Stable Diffusion
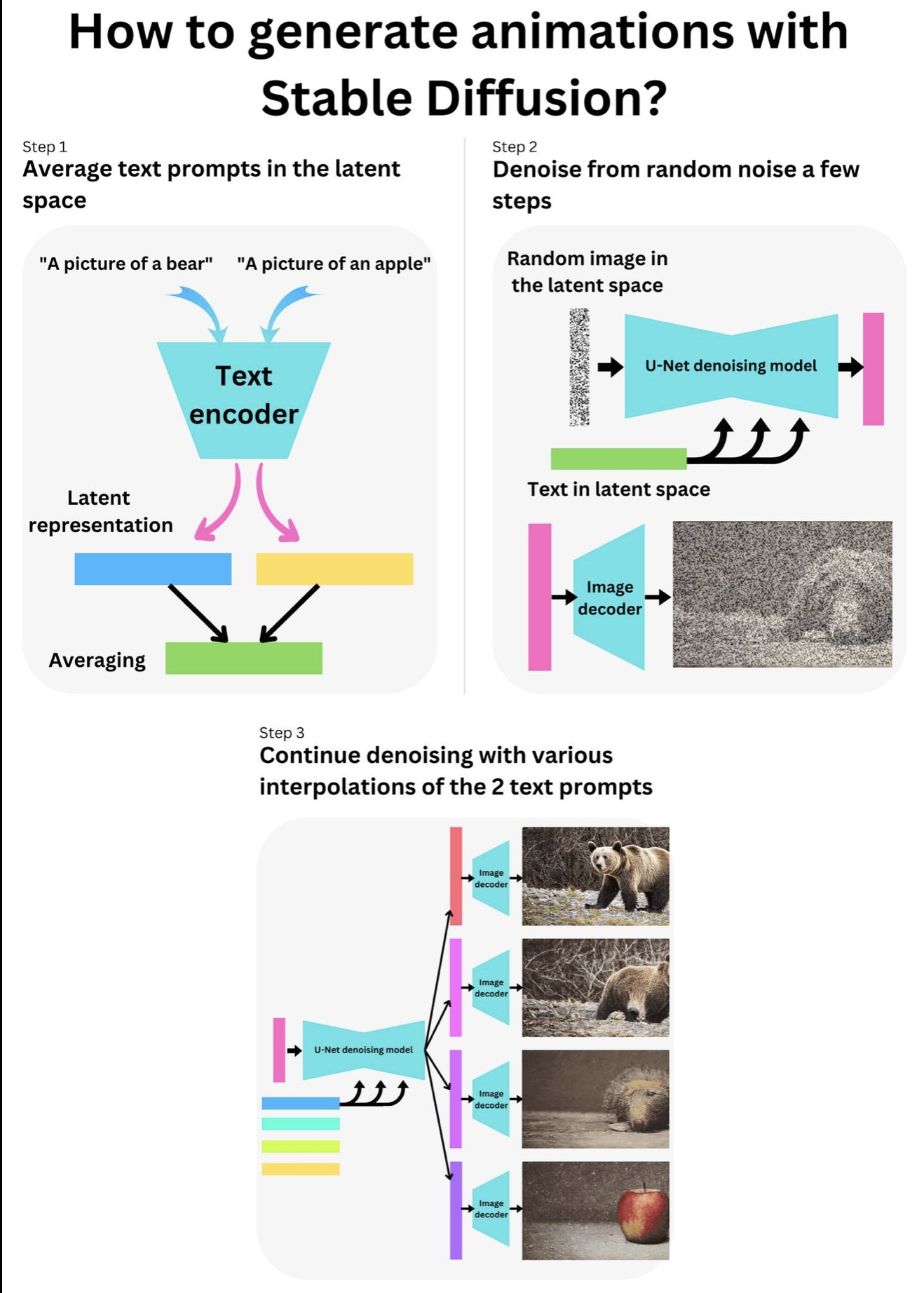
But how do we generate those cool animations with STABLE DIFFUSION? Check out the one I did in Replicate: https://replicate.com/p/uzj2czjjzradtjcrzet6yfqdkq. Those animations are mostly due to the fact that it is easy to interpolate between 2 images or 2 text prompts in the latent space (embedding representations). The DALL-E 2 article explains that pretty well: https://arxiv.org/pdf/2204.06125.pdf. You need a start and end prompt. I chose “A picture of a bear” and “A picture of an apple”. You then encode those texts in the latent space using the text encoder of the CLIP model (https://openai.com/blog/clip/), and you use the interpolation between the 2 text prompts to guide the denoising process of a random image for a few steps. This is just to anchor the denoising process in between the 2 prompts such that the animation is less jumpy. You then create as many intermediary interpolations between the 2 prompts as you need frames in your animation, and continue the denoising process until getting clean images. If you need smoother animations, you simply interpolate between the generated images in the latent space. I have had a lot of fun playing with Andreas Jansson’s implementation of animations with Stable Diffusion: https://replicate.com/andreasjansson/stable-diffusion-animation. He is using the pretrained model on Hugging Face (https://huggingface.co/…/huggingface…/diffuse-the-rest). You can learn more about it my Newsletter: https://newsletter.TheAiEdge.io/ —- Follow me for more Machine Learning content!
🚀 Stable diffusion stands out among diffusion models, Here is Why.
Stable Diffusion (SD) offers Knobs to trade-off Speed, Sample quality and Guidance for high fidelity.
Here are the ideas that made those properties possible:
→ Latent diffusion: Originally Diffusion models operated on Pixel space, hence computationally exorbitant, Latent diffusion projects images to a Latent space.
This means a immaculate tradeoff between sample quality and speed. Hence SD lends itself to high quality 512x512 samples in acceptable speeds. Canva introduced text to image using SD, recently.
→ Non-Markovian noise scheduling: Diffusion models noise and de-noise images along number of time steps . Akin to sequence modelling like in RNNs.
But RNNs are better than Markov models for sequence modelling because they defy markov porperty and can learn long range relationships.
Honouring the same tradition SD uses DDIM (and cousins), a set of Non-markovian noising schedulers to accelerates sampling as opposed to slower markovian DDPM.
SD exposes num_inference_steps for this, more the steps, better the image quality.
→ (Noise Conditional) Score-Based Modelling:
Typically likelihood models like VAE, Flow based, EBMs and implicitly generative models like GANs have multiple challenges.
Latter is unstable (owing to mode collapse) which inspite of adversarial training trades off diversity for quality.
Former tries to model the probability density (or mass) function of the distribution of the data which quickly becomes intractable mathematically. Hence score based models offers a perfect side stepping, to model a tractable score function using schedules of noise and measures performance by score matching techniques like Fischer’s divergence.
→ Classifier free guidance: Originally diffusion was aimed at unconditional generation. To condition the generation with text, guided diffusion was introduced, it was done using an ancillary classifier model that trades-off diversity of samples for fidelity aka faithfulness to the prompt.
Idea is to use the gradient of the classifier model trained on noisy images to guide demonising during inferences.
But thanks to Jonathan Ho, he introduced classifier free guidance (CFG), SD uses this technique and exposes a single scalar parameter called “guidance scale”. CFG removes the need for one extra model. DALL-E(CLIP), GLIDE and ImageGen (T5) all use a classier based guidance.
On the downside, CFG is one of the potential reasons why you need to write elaborate prompts for SD and but that’s not the case with DALL-E.
ML Youtube channels
Sometime we just need to sit back and relax watching videos! Here are great YouTube channels to learn Machine Learning from. Enjoy:
- What’s AI by Louis Bouchard: https://lnkd.in/euVngxvQ
- Abhishek Thakur (Practical videos, Talks) : https://lnkd.in/eTPrcvEN
- Ahlad Kumar (Deep learning, Theoretical): https://lnkd.in/eVGxpXfw
- Aladdin Persson (PyTorch, TensorFlow): https://lnkd.in/e29966pV
- Andreas Mueller: https://lnkd.in/eQYM3WyC
- Data School (Python, Machine learning, Theoretical): https://lnkd.in/eXEjf27Q
- Connor Shorten (Theoretical): https://lnkd.in/ejdwwyzq
- Jeremy Howard (Deep learning, Theoretical): https://lnkd.in/ec3DGa7g
- Rasa (Rasa, AI, NLP): https://lnkd.in/ehUe-qPE
- Yannic Kilcher (NLP, Machine learning, Deep learning, Theoretical): https://lnkd.in/ebRk-bMB
- OpenAI (NLP, Machine learning, AI): https://lnkd.in/eWvCKiqz
- Two Minute Papers (Machine Learning and AI Research, Scientific Papers): https://lnkd.in/eQY_5_SV
- Machine Learnia (Machine Learning, Scikit Learn, Python): https://lnkd.in/enFTrVh9
- Mark Saroufim (Machine Learning Engineering, Practical videos, Books review): https://lnkd.in/ez32nFS5
- sentdex (Python for AI and Finance): https://lnkd.in/eMsdgVbS
I found that curated list of YouTubers on this awesome repo: https://lnkd.in/eVgmFN8Y. That repo has similar lists for many other software skills, so make sure to check it out.
DALLE-2
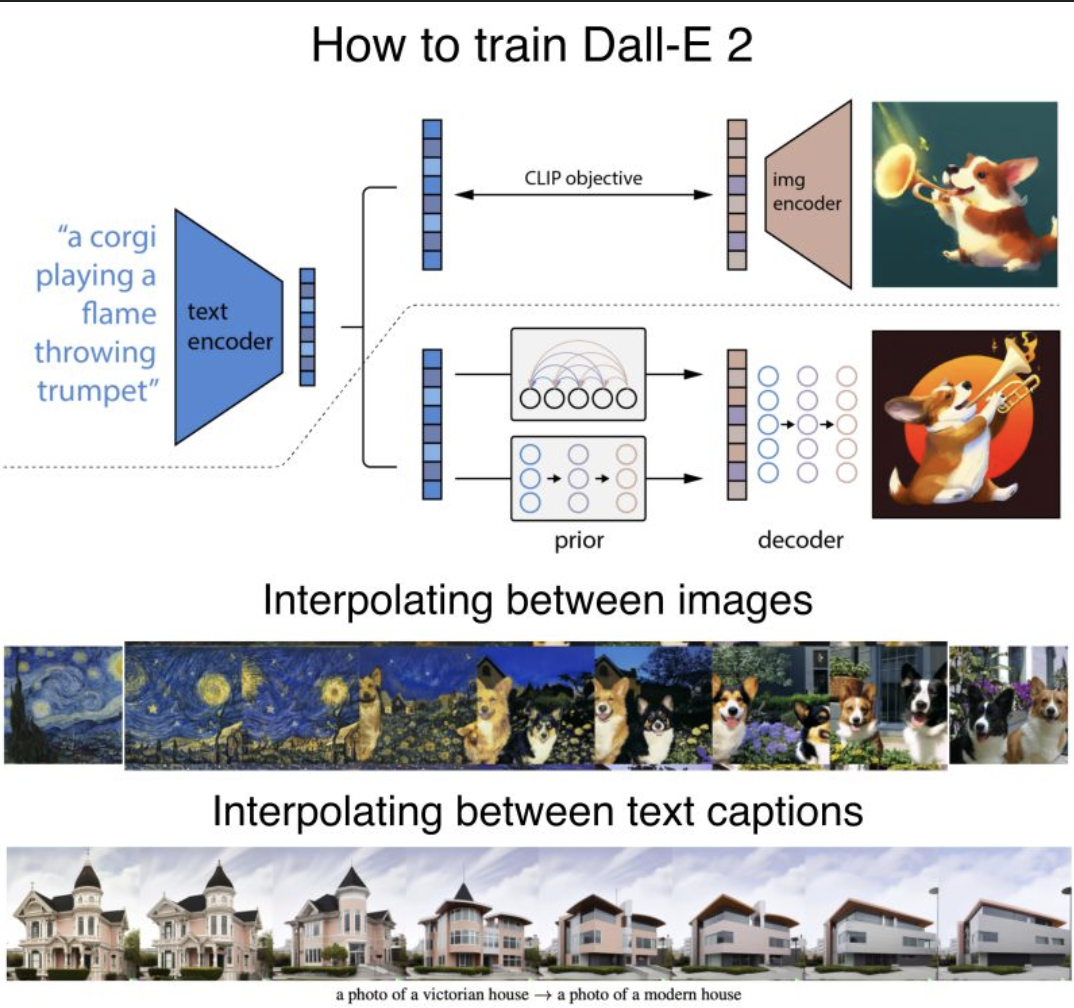
- How does DALL-E 2 work? DALL-E 2 generates non-deterministic images from text data.
-
It is basically a combination of 2 models: a CLIP model that predicts image from text and a diffusion model that predicts non-deterministically images from image embeddings.
- First, they train a Contrastive Language-Image Pre-training (CLIP) model that predicts images with text inputs: https://lnkd.in/eGNMirji, https://lnkd.in/eHbmBb2t.
- By training that model, they obtain a CLIP text embedding T and an image embedding E.
- The second model is a Diffusion model that takes an image embedding E and predicts non-deterministic images: https://lnkd.in/erwcgzzz, https://lnkd.in/eC3FRMMq
-> Piping those 2 models together, a text caption can be used to predict an image embedding E that in turn can be used to predict non deterministic images.
- Learning those embeddings lead to interesting properties.
- For example, we can take 2 images and their resulting embeddings E1 and E2 and continuously interpolate between the 2 embeddings in the latent space.
- This results in having the capability to create new images that seem to have their styled mixed together with a lot of control.
- We can also do a very similar thing with the text embedding by having 2 text captions and their resulting embeddings T1 and T2.
-
By interpolating between those 2 again in the latent space, we can continuously create images that capture the intermediate meaning of the 2 captions.
- The results are honestly baffling! I think with models like GAN and now Dall-E, we have entered an era of Machine Learning where engineers are able to put together specialized models together in a creative way to achieve what doesn’t look like what we used to call “Machine Learning” anymore.
- You can find the Dall-E 2 article here: https://lnkd.in/evk2QQWd, https://lnkd.in/e6HDhscP, and you can compare it to Dall-E 1: https://lnkd.in/etpBqDjK. If you want to play with it, you can try the OpenAI API: https://lnkd.in/ePSKNNWN
Forward-Forward Algorithm
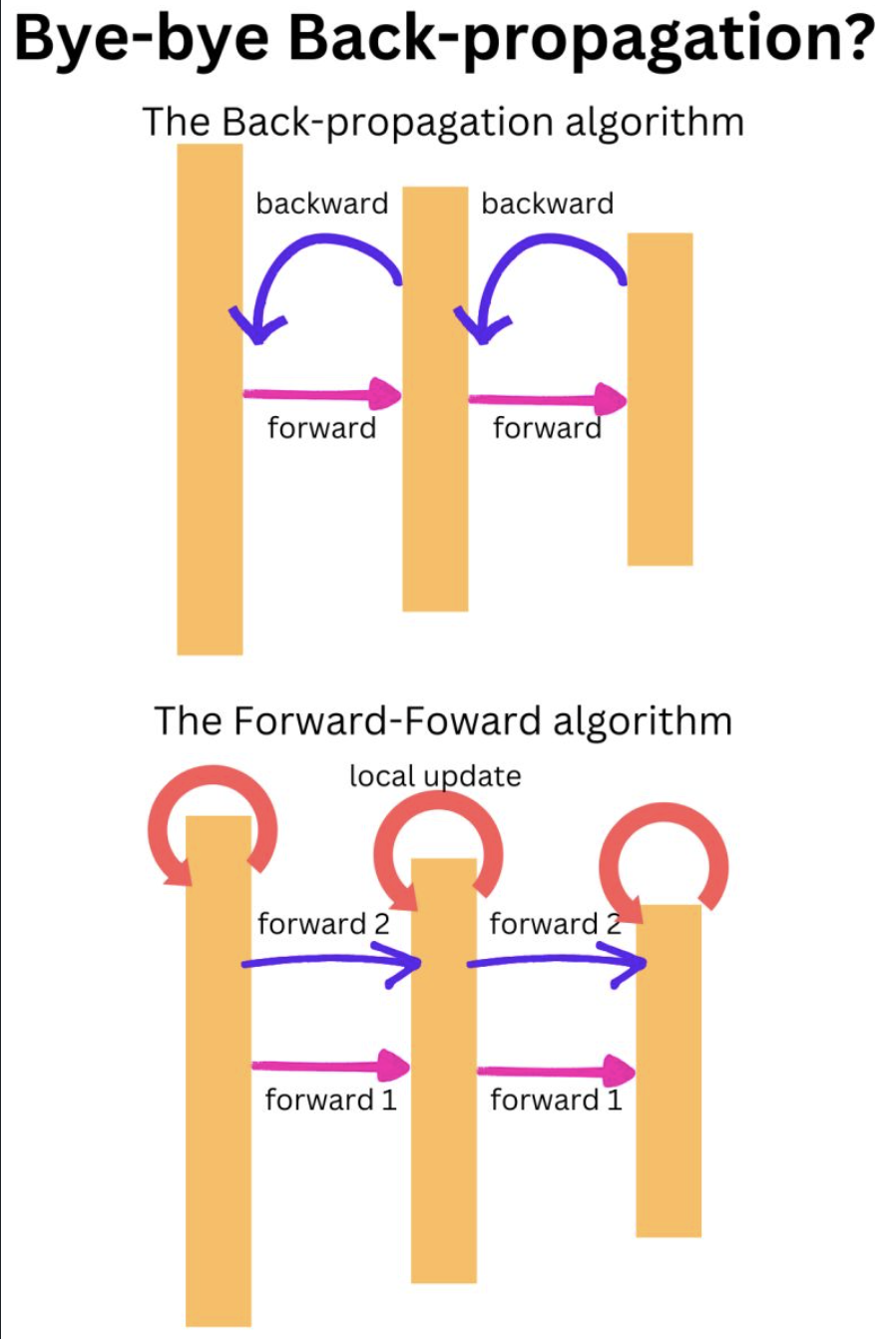
- We may not need the BACK PROPAGATION algorithm anymore! Hinton is presenting results on the Forward-Forward algorithm: https://lnkd.in/gkU_tqNz.
- The first forward pass in done with real data and the second forward data is done with “negative data” and the weights are learned by computing a local gradient. It seems to have 2 advantages: first, it to work well enough on a few problems for now, and second, there seems to be possible to separate the 2 forward learning phases.
-
Imagine if you could train the forward passes and the backward passes at different points in time. I will need time to build a good intuition on that one!
- At each layer, the local “target” P is the sum of the square of the activation functions squeezed in the probability space by a logistic function and a threshold.
- The real data should lead to P ~ 1 (activations above the threshold) and the negative data should lead to P ~ 0 (activations below the threshold).
-
The gradient can be computed locally and the weights can be updated using that “local classification” process.
- For image classification for example, the real data could be a pair of image X and a target y (X, y), where the negative data can be an image X paired with a random target y’ (X, y’).
You can find a PyTorch implementation of the Forward-Forward algorithm in this repo: https://lnkd.in/g58uv7TK. I am looking forward to see more experimental results on that one. I have a feeling that this is going to change Deep Learning as we know it!
ChatGPT
- Do you know how ChatGPT was trained? ChatGPT is “simply” a fined-tuned GPT-3 model with a surprisingly small amount of data!
-
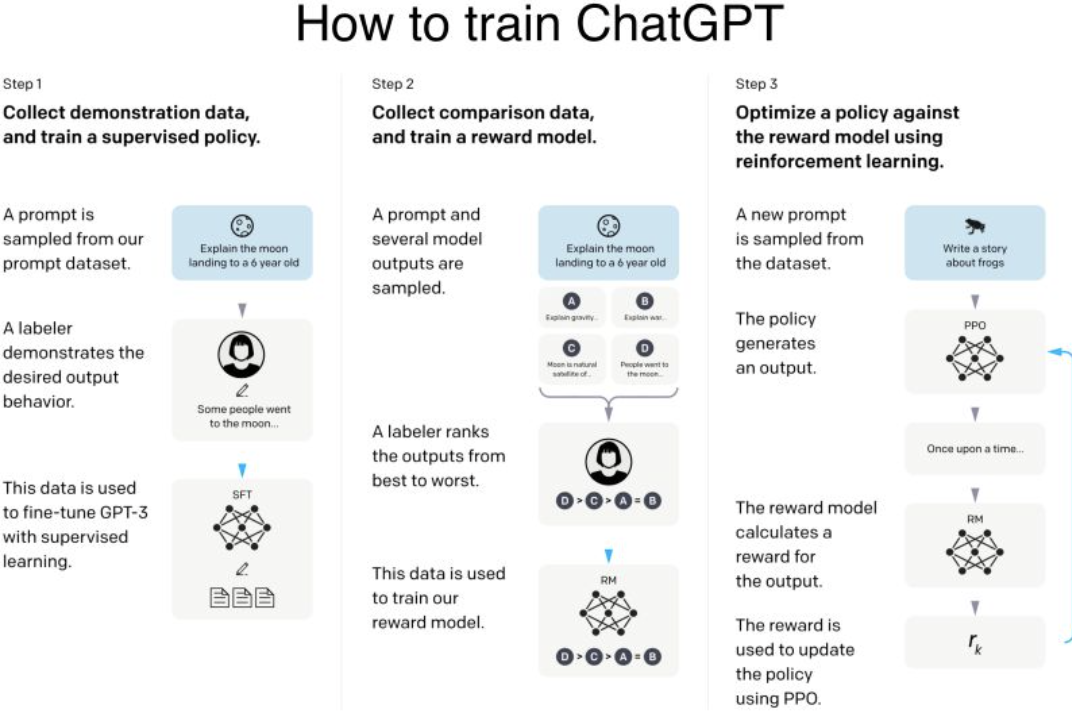
Moreover, ChatGPT is using 1.3B parameters where GPT-3 uses 175B parameters! It is first fine-tuned with supervised learning and then further fine-tuned with reinforcement learning. They hired 40 human labelers to generate the training data. Let’s dig into it!
- First, they started by a pre-trained GPT-3 model trained on a broad distribution of Internet data (https://lnkd.in/gAUtxvrM).
- Then sampled typical human prompts used for GPT collected from the OpenAI website and asked labelers and customers to write down the correct output.
-
They fine-tuned the model with 12,725 labeled data.
- Then, they sampled human prompts and generated multiple outputs from the model for each of the prompt. A labeler is then asked to rank those outputs.
-
The resulting data is used to train a Reward model (https://lnkd.in/gdrzdWu3) with 33,207 prompts and ~10 times more training samples using different combination of the ranked outputs.
- We then sample more human prompts and they are used to fine-tuned the supervised fine-tuned model with Proximal Policy Optimization algorithm (PPO), a Reinforcement Learning algorithm (https://lnkd.in/gsDTWtga).
- The prompt is fed to the PPO model, the Reward model generates a reward value, and the PPO model is iteratively fine-tuned using the rewards and the prompts using 31,144 prompts data.
This process is fully described in here: https://lnkd.in/gnt9K9pu. The paper actually details a model called InstructGPT which is described by OpenAI as a “sibling model” to ChatGPT, so the numbers shown above may be slightly different from the exact ones used for ChatGPT.
What is it about ChatGPT we get so impressed by? GPT-3’s output is no less impressive but why does ChatGPT’s outputs feel “better”? The main difference between ChatGPT and GPT-3 is the tasks they are trying to solve. GPT-3 is mostly trying to predict the next token based on the previous tokens, including the ones from the user’s prompt, where ChatGPT tries to “follow the user’s instruction helpfully and safely”. ChatGPT is trying to align to the user’s intention (alignment research). That is the reason InstructGPT (ChatGPT’s sibling model) with 1.3B parameters give responses that “feel” better than GPT-3 with 175B parameters.
The Training
ChatGPT vs GPT-3
The Training ChatGPT is “simply” a fined-tuned GPT-3 model with a surprisingly small amount of data! It is first fine-tuned with supervised learning and then further fine-tuned with reinforcement learning. In the case of InstructGPT, they hired 40 human labelers to generate the training data. Let’s dig into it (the following numbers were the ones used for InstructGPT)!
First, they started by a pre-trained GPT-3 model trained on a broad distribution of Internet data (GPT-3 article). Then sampled typical human prompts used for GPT-3 collected from the OpenAI website and asked labelers and customers to write down the correct outputs. They fine-tuned the model in a supervised learning manner using 12,725 labeled data point.
Then, they sampled human prompts and generated multiple outputs from the model. A labeler is then asked to rank those outputs. The resulting data is used to train a Reward model (https://arxiv.org/pdf/2009.01325.pdf) with 33,207 prompts and ~10 times more training samples using different combinations of the ranked outputs.
They then sampled more human prompts and they were used to fine-tuned the supervised fine-tuned model with Proximal Policy Optimization algorithm (PPO) (https://arxiv.org/pdf/1707.06347.pdf), a Reinforcement Learning algorithm. The prompt is fed to the PPO model, the Reward model generates a reward value, and the PPO model is iteratively fine-tuned using the rewards and the prompts using 31,144 prompts data.
ML for Ads Ranking RecSys
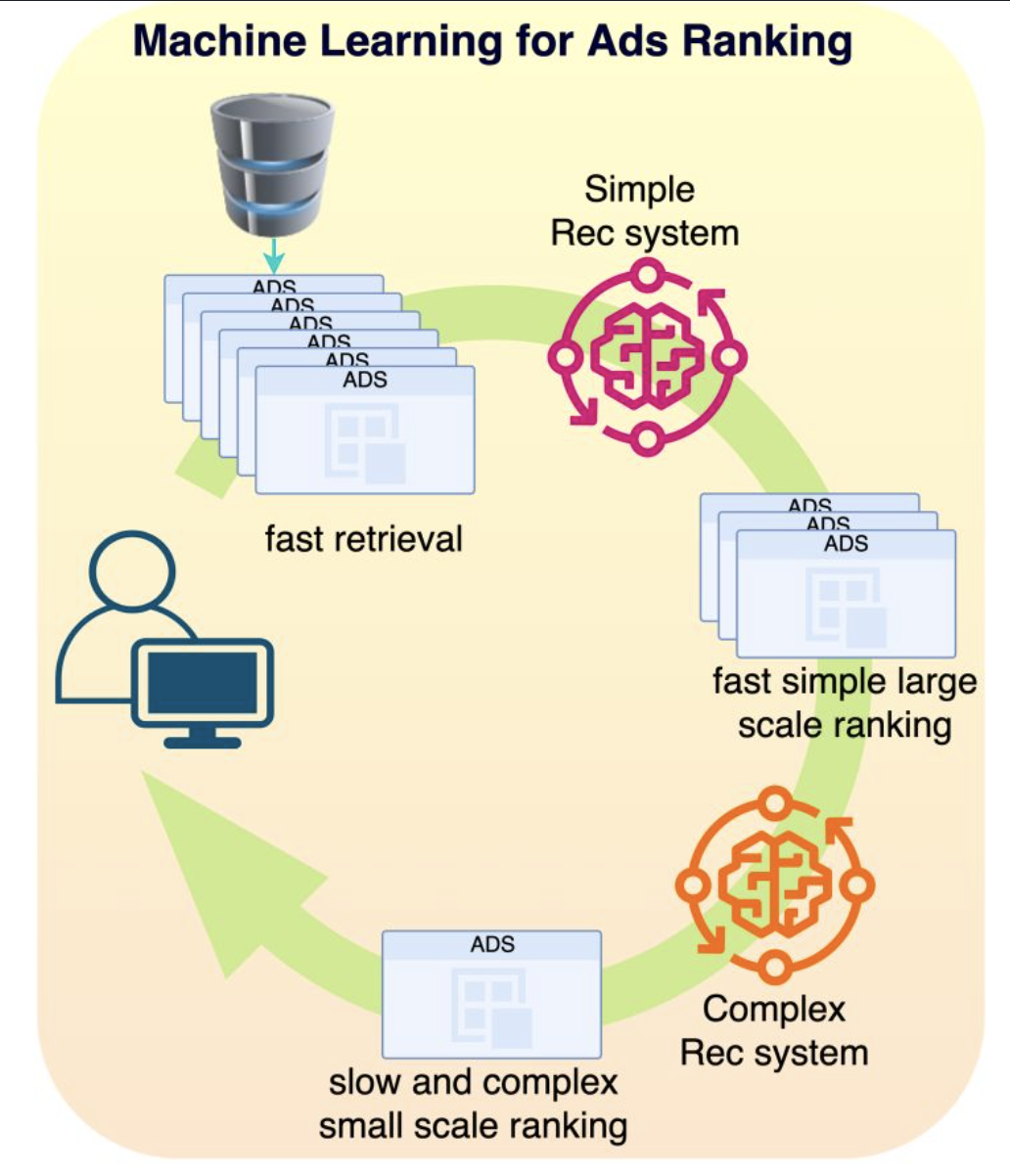
At Meta, we were using many different paradigms of Recommendation Engines for ADS RANKING. Conceptually, a recommender system is simple: you take a set of features for a user U and a set of features for an item I along with features C capturing the context at the time of the recommendation (time of the day, weekend / week day, …), and you match those features to an affinity event (e.g. did the user click on the ad or not): click or not = F(U, I, C).
-In the early days they started with Gradient Boosting models. Those models are good with dense features (e.g. age, gender, number of clicks in the last month, …) but very bad with sparse features (page Id, user Id, Ad Id, …). By the way, we often talk of the superiority of Tree based models for tabular data, well this is a real exception to the rule! Those sparse features are categorical features with literally billions of categories and very few sample events. For example, consider the time series of sequence of pages visited by a user, how do you build features to capture that information? That is why they moved to Deep Learning little by little where a page Id becomes a vector in an embedding and a sequence of page Ids can be encoded by transformers as a simple vector. And even with little information on that page, the embedding can provide a good guess by using similar user interactions to other pages.
-Typical models we were using were Multi-task learning (https://lnkd.in/gVZ7HrUz), Mixture of experts (https://lnkd.in/dE6XZvJx) or Multi-towers models (https://lnkd.in/gPZ-GfRS). In Ads Ranking, the ranking happens in stages: first you select a sub-universe of ads (let’s say 1M ads) that relate to the user (very fast retrieval), then you select a subset of those ads (let’s say 1000 Ads) with a simple model (fast inference) and then you use a very complex model (slow inference) to rank the resulting ads as accurately as possible. The top ranked ad will be the one you see on your screen. We also used MIMO (multi-inputs multi-outputs) models to simultaneously train the simple and complex models for efficient 2 stages ranking.
-I cannot think of a model type that capture better the success of ML in our societies. Google search, Google or Facebook Ads, Youtube suggestions, Netflix movie suggestions, Amazon products search, … are all the results of decades of research in recommender systems and are all top drivers of the cash flows for those companies.
Is PageRank still used at Google
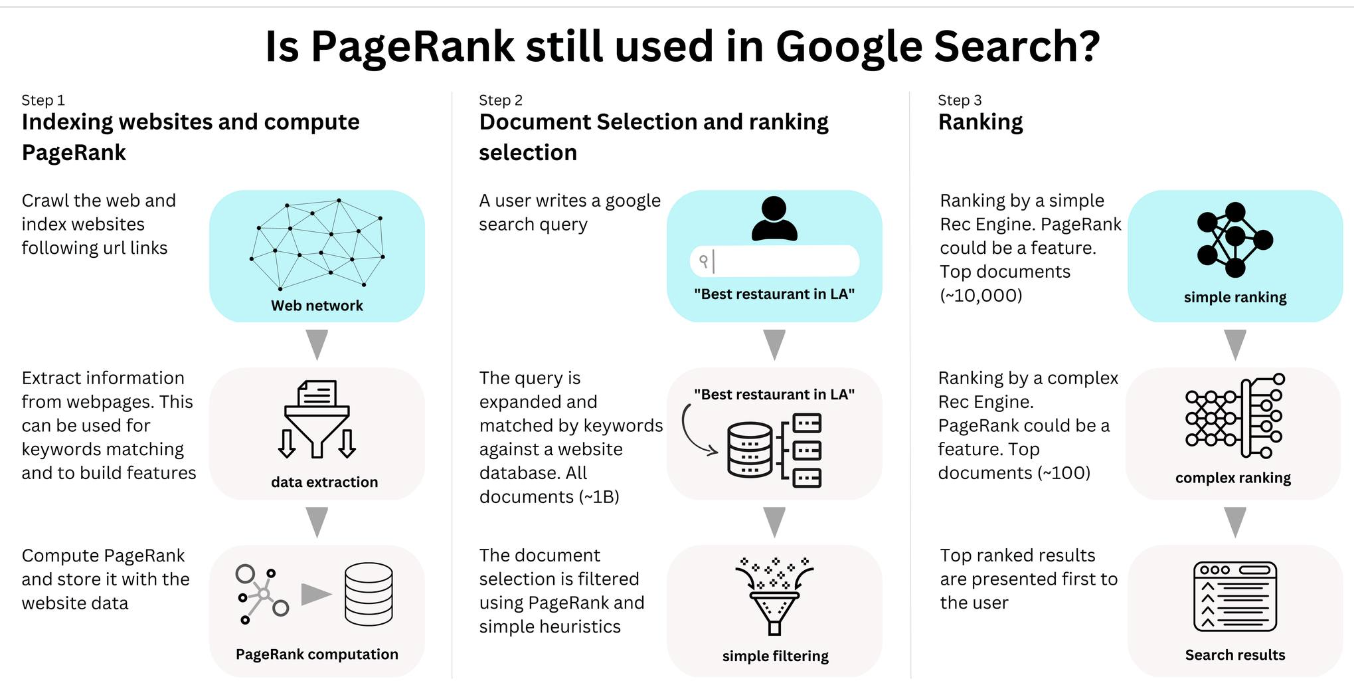
Is PageRank still used as part of Google Search? Yes we know it is as we can see in the list of systems that are currently in use: https://developers.google.com/…/ranking-systems-guide. PageRank is a metric of importance of a website as measured by how connected that website is to others (https://snap.stanford.edu/…/cs224w…/Brin98Anatomy.pdf). It used to be the main way websites were ranked in Google Search, leading to its success at the time, but now searches are personalized where PageRank is a global metric. We don’t know how it is used, but we can pretty much guess!
-
A Google search happens in stages. First, the search query is expanded and used to perform an initial Document Selection. This document selection is driven by keywords matching in a database. If I type today “google search”, Google tells me there are about 25B results related to my search.
-
Then results go through a set of Recommender engines. There is most likely a simple Rec Engine first ranking a large amount of documents (maybe 100,000 or 10,000 documents) and a complex one refining the ranking of the top ranked documents (maybe 100 or 1000). Who cares about the quality of the ranking for the documents far in the list of documents! The websites are probably already ranked by PageRank in the initial document selection as it can be computed at indexing time. There is no need to send all 25B documents to the first Rec engine, and PageRank is most likely used as a cutoff to send a small subset.
-
However it is unlikely that PageRank is the only cutoff parameter as some websites would never get discovered. I would expect some simple geolocalization and context matching metrics as well as randomization to be used as well.
-
At this point the ranking becomes personalized, and user data becomes the main factor, but PageRank is likely to still be used as a feature for all the successive Rec Engines used in the search pipeline.
Obviously those are educated guesses as those information are not public. You can learn more about it my Newsletter: https://newsletter.TheAiEdge.io/
CLIP
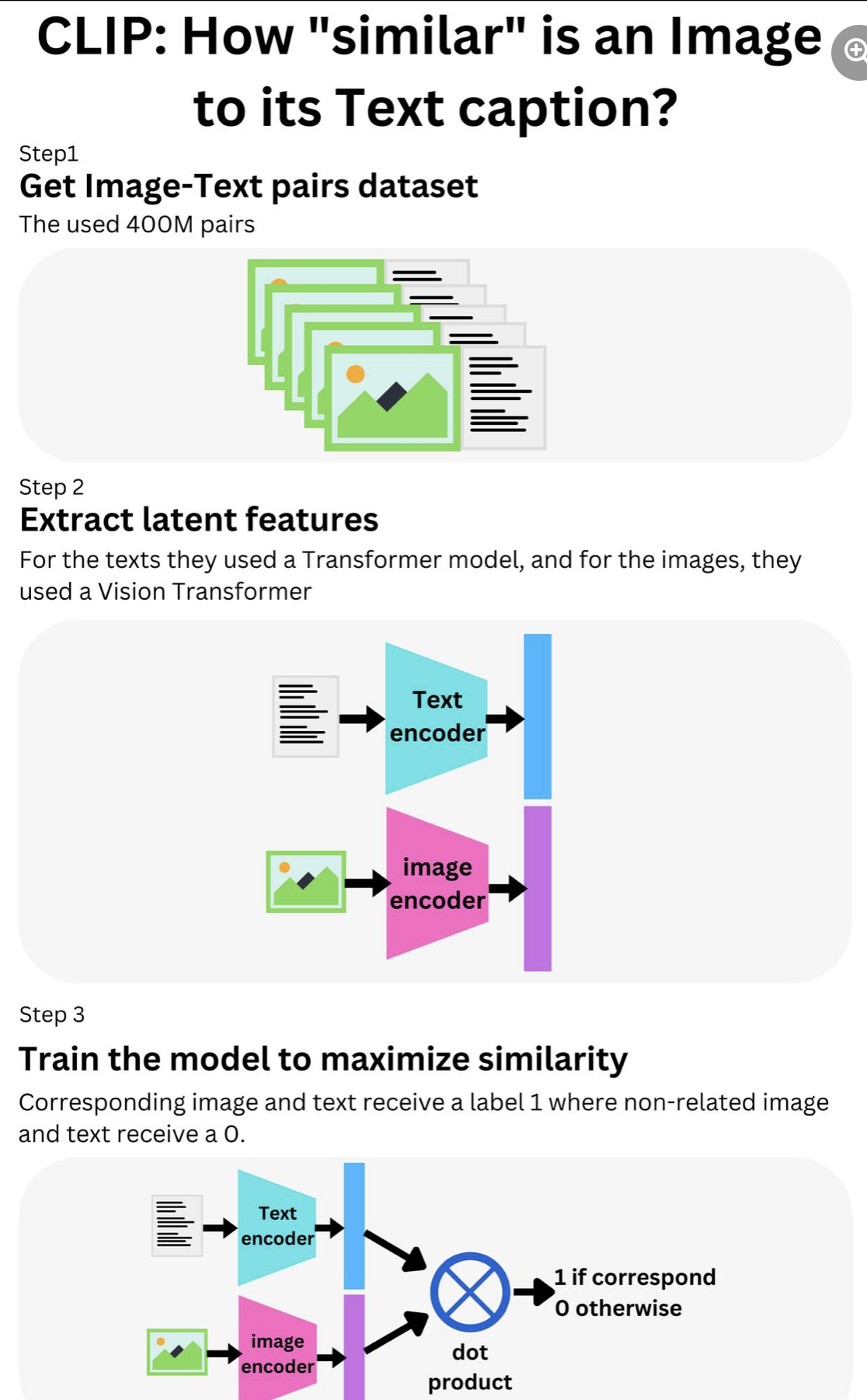
How would you know if an image is “similar” to its text caption? Conceptually, you could “simply’’ measure the cosine similarity between the image and the text. That is the idea behind CLIP (Contrastive Language-Image Pretraining: https://openai.com/blog/clip/), the OpenAI algorithm underlying Dall-E 2 (https://arxiv.org/pdf/2204.06125.pdf) and Stable Diffusion (https://arxiv.org/pdf/2112.10752.pdf). An intermediate latent vector representation of the image and the text is learned such that a high value of the dot product is indicative of high similarity. First, they created a dataset of 400M pairs (image, text) from publicly available datasets on the internet. Then they used a 63M parameters Transformer model (A small GPT-2 like model: https://cdn.openai.com/…/language_models_are…) to extract the text features T and a Vision transformer (https://arxiv.org/pdf/2010.11929.pdf) to extract the image features I. The resulting vectors are further transformed such that the text and image vectors have the same size. With N (image, text) pairs, we can generate N^2 - N pairs where the image does not correspond to the text caption. They then take the normalized dot product (cosine similarity) between T and I. If the text corresponds to the image, the model receives a label 1 and 0 otherwise, such that the model learns that corresponding image and text should generate a dot product close to 1. This model has a lot of applications in zero-shot learning! In typical image classification, we feed the model with an image, and the model provides a guess from a set of predefined text labels used during the supervised training. But with CLIP, we can provide the set of text labels we want the model to classify the image into without having to retrain the model because the model will try to gauge the similarity between those labels and the image. We can virtually build an infinite amount of Image classifiers by just switching the text labels! The article ( https://arxiv.org/pdf/2103.00020.pdf) showcases the robustness of CLIP to generalize to different learning tasks without the need to retrain the model. In my opinion, this adaptability of ML models shows how much closer we are from true Artificial Intelligence! CLIP is an open-source project (https://github.com/openai/CLIP), so make sure to try it.
Quick Feature Selection Method
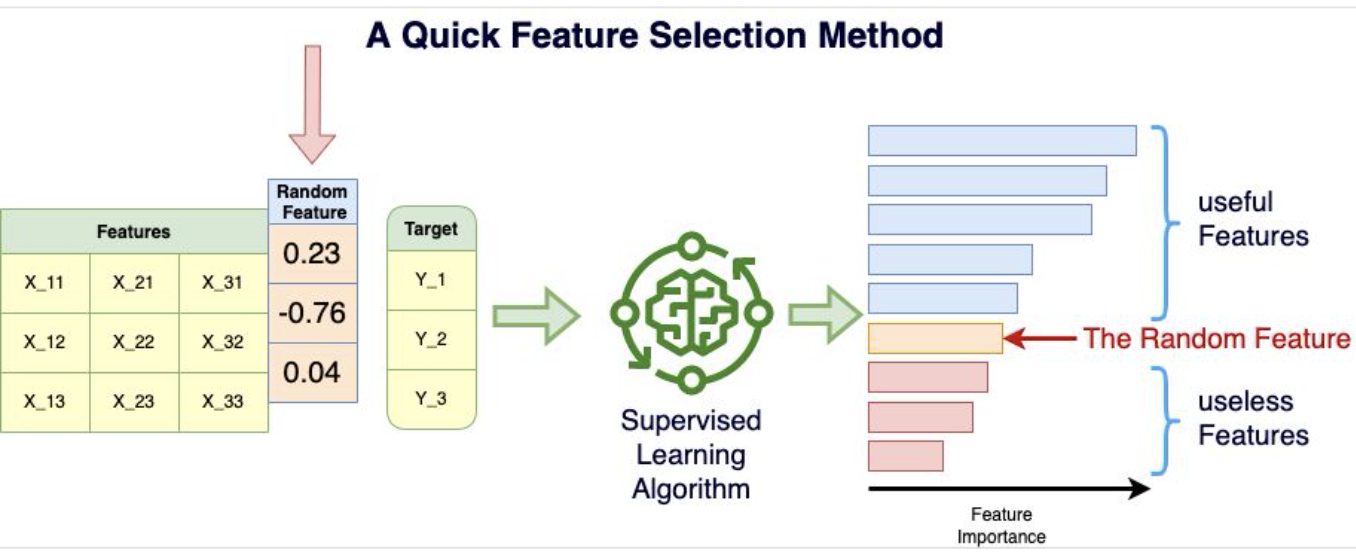
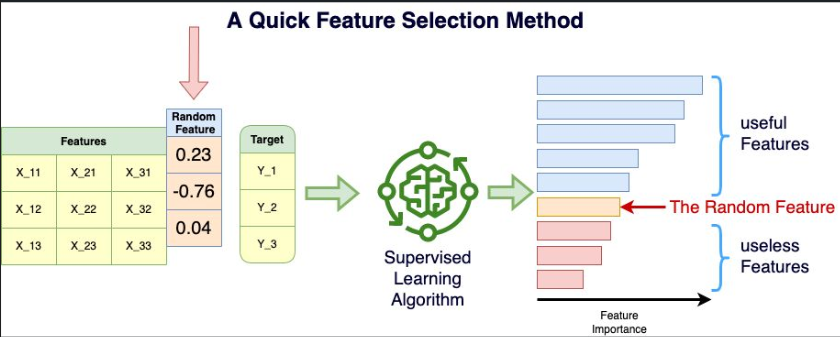
This is a technique I like to perform a quick FEATURE SELECTION for Machine Learning applications. I tend to call it the “Random Bar” method! Let’s assume you have a feature set X and a target Y. Let’s create a random vector V (for example np.random.normal(size=(1, 100))) and append that vector as a new feature to X: X’ = [X, V] X’ is just the original feature set with additionally the new random feature. Keep in mind that this new feature cannot possibly help to predict the target Y since it is random! Now, take that data (X’, Y) and train a Supervised Learning algorithm with a Feature Importance measure that is relevant for you application. Intuitively, the mean entropy gain per split of tree based algorithms (Random Forest, Xgboost, …) is a convincing measure of feature importance to me. The statistical fluctuation of the data is such that even the random feature will be attributed a non-zero feature importance by the algorithm, but we know it is artificial. Any feature with a lower feature importance than the random feature has to be useless to predict the target and the features with a higher feature importance are at least better than random noise at predicting the target. This is especially useful if you have thousands of features and you want to weed out quickly the ones that won’t have any impact in the learning process. This is also a method that can be used for highly non-linear data as opposed to LASSO (for example) that tends to only understand linear relationships in the data. The random feature is a “Random Bar” because this is the minimum bar a feature needs to beat to be a part of the potentially useful features set. Now it doesn’t mean there are not additional features that could be beneficial to further remove to optimize your model. Do you know if this method has a more jargon-y name? What is your favorite feature selection method?
Overfitting
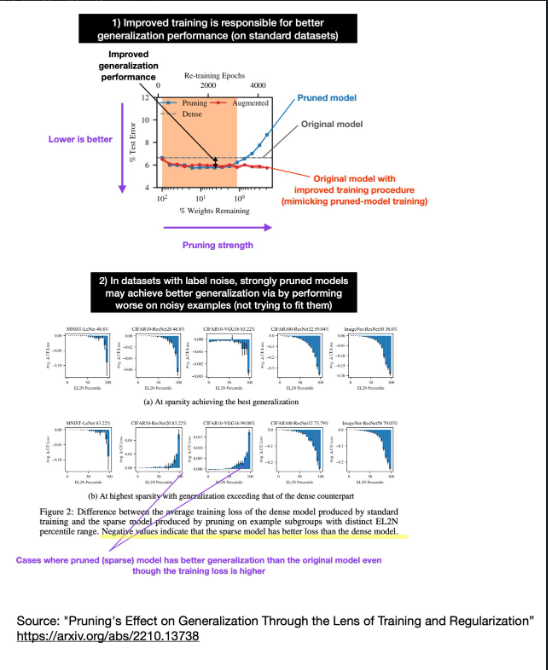
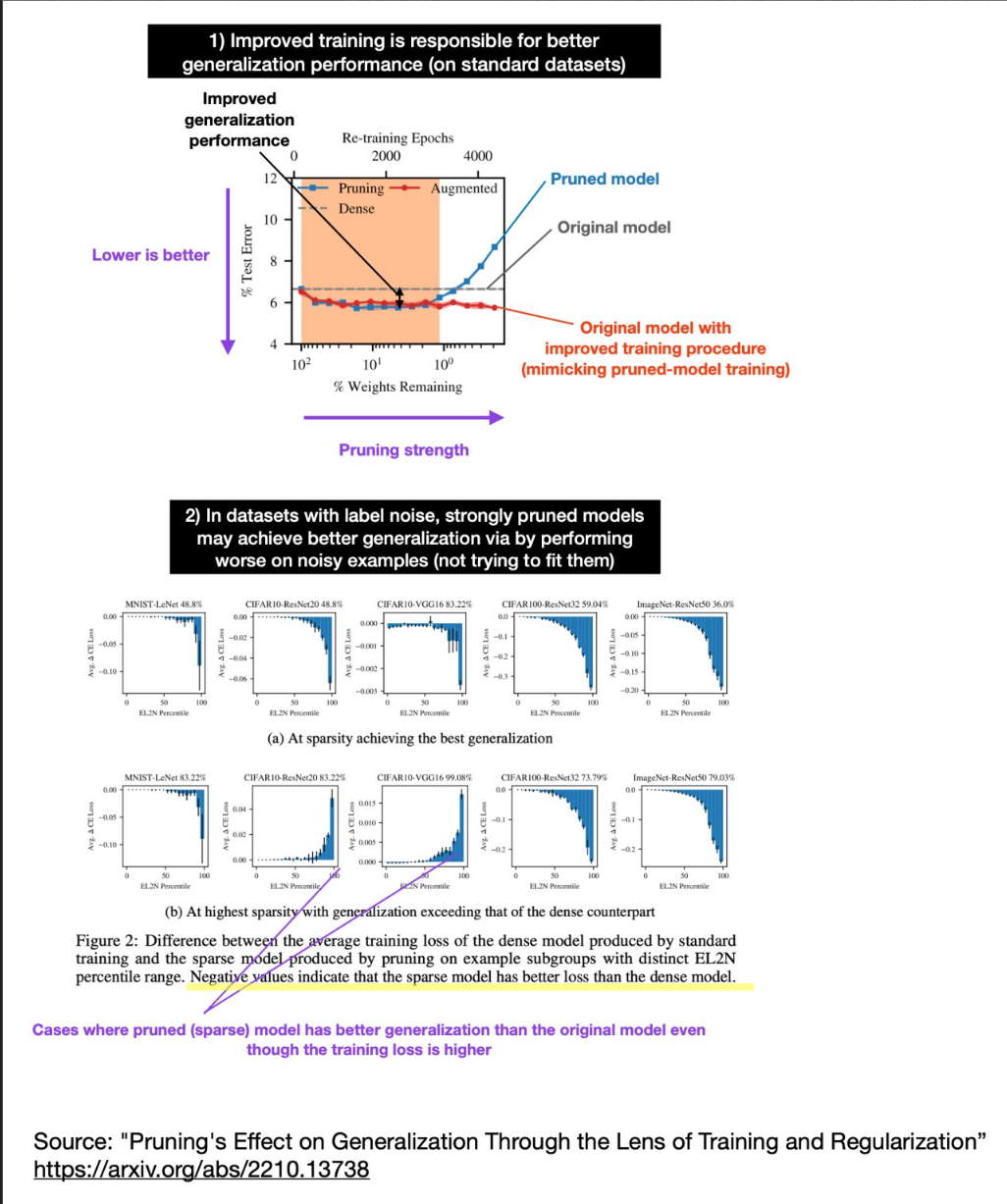
After sharing various methods that reduce overfitting yesterday, I found some intriguing new research studying the effect of pruning on the generalization performance.
It’s been known that pruning (producing smaller models) can improve generalization performance. At the same time, we also know that larger, overparameterized models can improve generalization performance (e.g., see double decent and grokking).
So, how can we reconcile the observation that pruned models can exhibit better generalization performance with contradictory observations from double decent and grokking studies? Researchers recently showed that the reduction of overfitting due to pruning could be partly explained by the improved training process[. Pruning involves more extended training periods and a replay of learning rate schedules that are partly responsible for improved generalization performance.
On noisy datasets, however, the generalization performance improvements due to pruning can be explained by a larger loss on noisy training examples. Why is a larger loss on noisy training examples better? Presumably because the pruned models don’t try to fit these noisy examples, which adds a regularizing effect – this is somewhat similar to reducing the width of the layers.
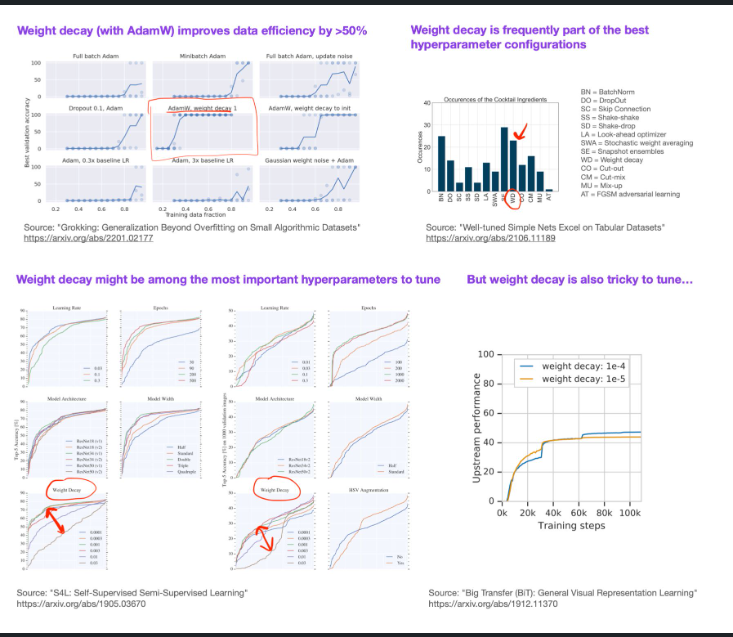
- Suppose your deep neural network suffers from overfitting. In that case, there is a large pool of techniques and approaches to choose from (I separated the most common ones into dataset and model perspectives two days ago).
Now, the follow-up question is, which of the techniques gives you the most gain? Weight decay (with AdamW) is definitely one you should consider in your regularization cocktail.
In the figure below, I summarized 4 references that discuss different aspects of weight decay and its effects on overfitting.
Pruning
After sharing various methods that reduce overfitting yesterday, I found some intriguing new research studying the effect of pruning on the generalization performance.
It’s been known that pruning (producing smaller models) can improve generalization performance. At the same time, we also know that larger, overparameterized models can improve generalization performance (e.g., see double decent and grokking).
So, how can we reconcile the observation that pruned models can exhibit better generalization performance with contradictory observations from double decent and grokking studies? Researchers recently showed that the reduction of overfitting due to pruning could be partly explained by the improved training process[. Pruning involves more extended training periods and a replay of learning rate schedules that are partly responsible for improved generalization performance.
On noisy datasets, however, the generalization performance improvements due to pruning can be explained by a larger loss on noisy training examples. Why is a larger loss on noisy training examples better? Presumably because the pruned models don’t try to fit these noisy examples, which adds a regularizing effect – this is somewhat similar to reducing the width of the layers.
Information Retrieval Metrics
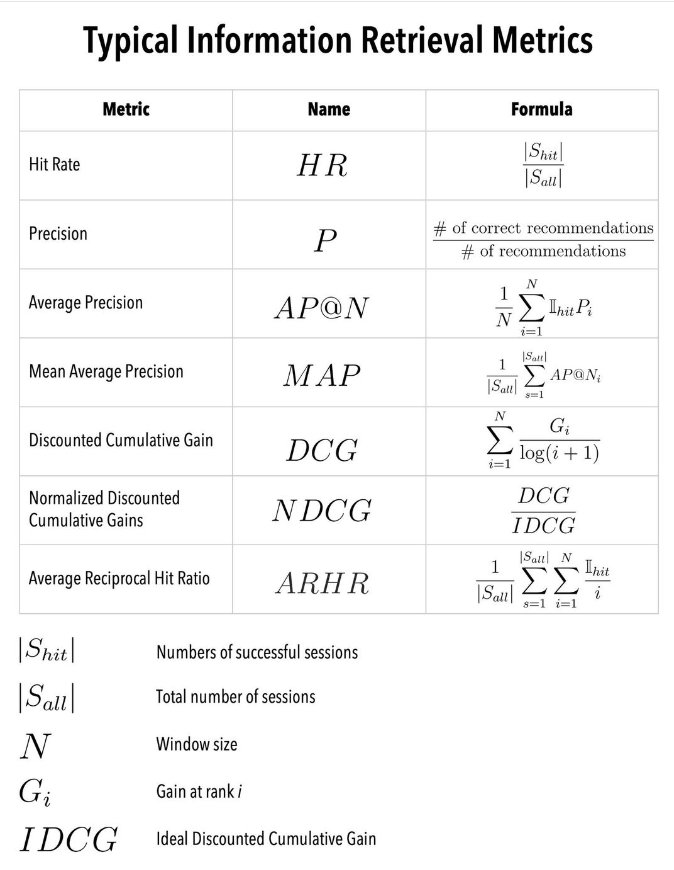
I may be wrong, but I think it is quite unlikely that Google ML ENGINEERS are using typical information retrieval metrics to assess the offline performance of the ML classifiers used within Google Search or similar search engine! There are ~3.5 billion searches per day, with each search generating a lot of positive and negative samples. If you train a classifier on that data, you probably want to spam at least a few days of data if not more. It is an extremely class imbalanced problem, so you’ll probably want to downsample the majority class for the computation to be manageable. That is still tens of billions of samples for each model development at least!
A metric like Normalized Discounted Cumulative Gain (NDCG) requires the concept of relevance (gain) to part of the data. That can be achieved with manual labeling but that is NOT going to be manageable on billions of samples. Metrics like Mean Reciprocal Rank (MRR) or Mean Average Precision (MAP) requires to know the true rank of the sample, meaning if I assess a classifier on a validation data, the predicted rank per search session is not going to be meaningful if we downsampled the data, and the metrics will be extremely dependent on the specific sampling scheme. We could imagine that we downsample the number of sessions instead of the majority class, but this forces us to only keep the top samples shown by the algorithms. That seems unwise since this will prevent ML engineers from experimenting with new sampling methods in future developments and the models will never see very negative samples, which is a bit problematic if we want to build an accurate model. The same problem occurs with a metric like Hit rate, since you need a window size.
If you order the search results by the probability of click provided by the classifier, the log-loss (or cross entropy) is a completely acceptable ranking metric. It is a point-wise metric, which means it doesn’t require us to know the predicted rank of the sample to compute a meaningful value. The probability itself will be biased by the false class distribution coming from the downsampling, but this can be corrected by recalibrating the probability p using the simple formula: p’ = p / (p + (1-p) * s), where s is the negative sampling rate (https://eva.fing.edu.uy/…/Elkan_2001_The_foundations_of…).
With a probability metric such as the log-loss, I expect more freedom for the ML engineers to experiment with new techniques. For example, in the case of search engines, we could label with 1 the clicked links and 0 the non-clicked links, but you could also imagine that the negative samples are only sampled from unsuccessful sessions (where the users did not find the right link). In a successful session, the non-clicked links are not really “bad”, they are just less interesting to the user. To be able to assess across models and teams, it might be useful to use the normalized entropy metric (https://deychak.github.io/normalized-cross-entropy) as anything above 1 is worse than random.
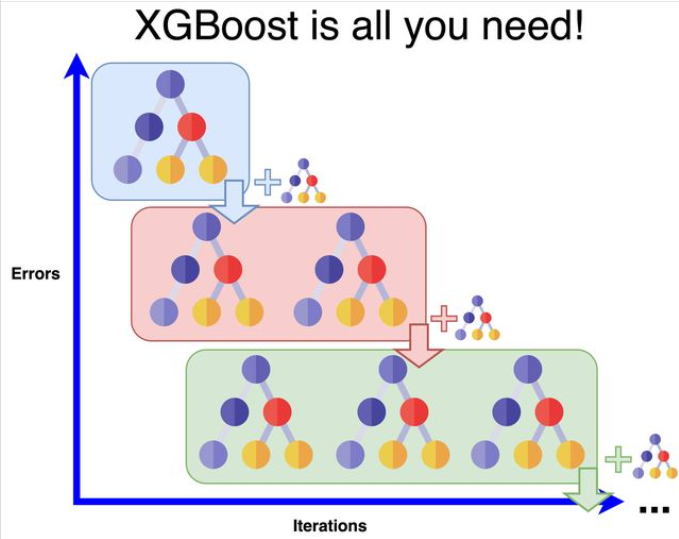
XGBoost
“XGBoost is ALL you need!” Well, it is true until it is not. Algorithms like Linear Regression have their number of degrees of freedom (d.o.f. - complexity) scaling with the number of features O(M). In practice, this means that their ability to learn from the data will plateau in the regime N » M where N is the number of samples (typically large data sets). They have a high bias but a low variance and as such they are well adapted to the N > M regime. In the N < M regime, L1 regularization becomes necessary to learn the relevant features and zero-out the noise (think about having more unknowns than equations to solve a set of linear equations). Naive Bayes d.o.f. scales as O(C x M) (or O(M)depending on the implementation) where C is the number categories the features are discretized into. O(C) = O(N) in theory but not really in practice. This makes it a lower bias algorithm than LR but it is a product ensemble of univariate models and ignores the feature interactions (as LR does) preventing it from further improvements.
A tree in its unregularized form, is a low bias (you can overfit the data to death), with d.o.f scaling as O(N), but high variance (deep trees don’t generalize well). But because a tree can reduce its complexity as much as needed, it can work in the regime N < M by simply selecting the necessary features. A Random Forest is therefore a low bias algorithm but the ensemble averages away the variance (but deeper trees call for more trees) and it doesn’t overfit on the number of trees (Theorem 1.2 https://www.stat.berkeley.edu/~breiman/randomforest2001.pdf), so it is a lower variance algorithm. The homogenous learning (the trees tend to be similar) tends to limit its ability to learn on too much data.
XGBoost is the first (to my knowledge) tree algorithm to mathematically formalize regularization in a tree (eq. 2 https://arxiv.org/pdf/1603.02754.pdf). It is a low bias and high variance (due to the boosting mechanism) and is therefore adapted to large data scales. The GBM Boosting mechanism ensures a more heterogenous learning than RF and therefore adapts better to larger scales. The optimal regularization ensures higher quality trees as weak learners than in RF and tends to be more robust to overfitting than RF.
In the regime N » M, only low bias algorithms make sense with d.o.f. scaling as O(N). That includes algorithms like GBM, RF, Neural Networks, SVM (gaussian), KNN,… SVM has a training time complexity of O(N^3) (unmanageable!) and KNN is bad at understanding what is an important feature and has dimensionality errors scaling as O(M). Neural Networks are known to underperform compared to XGBoost on tabular data.
So, if you are working on large data, XGBoost MAY be all you need! But make sure to prove it to yourself. The no Free-Lunch Theorem doesn’t mean we cannot understand our algorithms and build an intuition on what are the best use cases to use them!
—
Follow me for more Machine Learning content!
#machinelearning #datascience #XGBoost
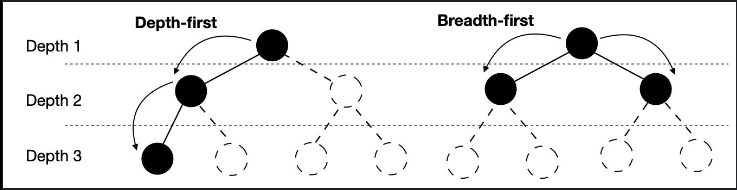
A question often arises when teaching is how XGBoost and LightGBM differ. The short fun-fact summary is that the tree-building algorithms are a tad different.
XGBoost’s trees are based on breadth-first search, comparing different features at each node.
LightGBM performs depth-first search, focusing on a single feature at a time and growing the tree from there.
1) BFS : Is memory intensive, take more time to execute. Likely to underfit if stop early. To control this I guess some package has ability to convert that to Uniform Cost search I believe it will work well where dataset contains more categorical independent variable
2) DFS: Require less memory as compared to BFS. Likely to overfit and stuck in local minima situation. To control this I guess some package has ability to convert that to Depth Limit Search. I believe DFS will work well in number input features.
Data Parallelization by Sebastian Raschka
When I started grad school, training deep neural networks on a GPU was something special – it was both tricky to do and awesome when it worked).
The world has moved on since then! Nowadays, training a model on a single GPU would be considered a major bottleneck.
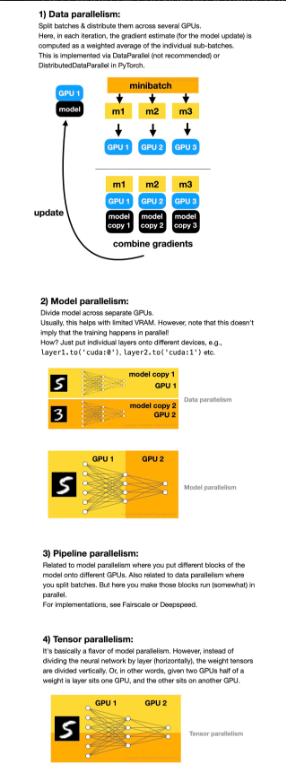
Here is a quick overview of the 4 different paradigms for multi-GPU training.
1) Data parallelism 2) Model parallelism 3) Pipeline parallelism 4) Tensor parallelism
Top 5 basic checks when trianing deep learning models
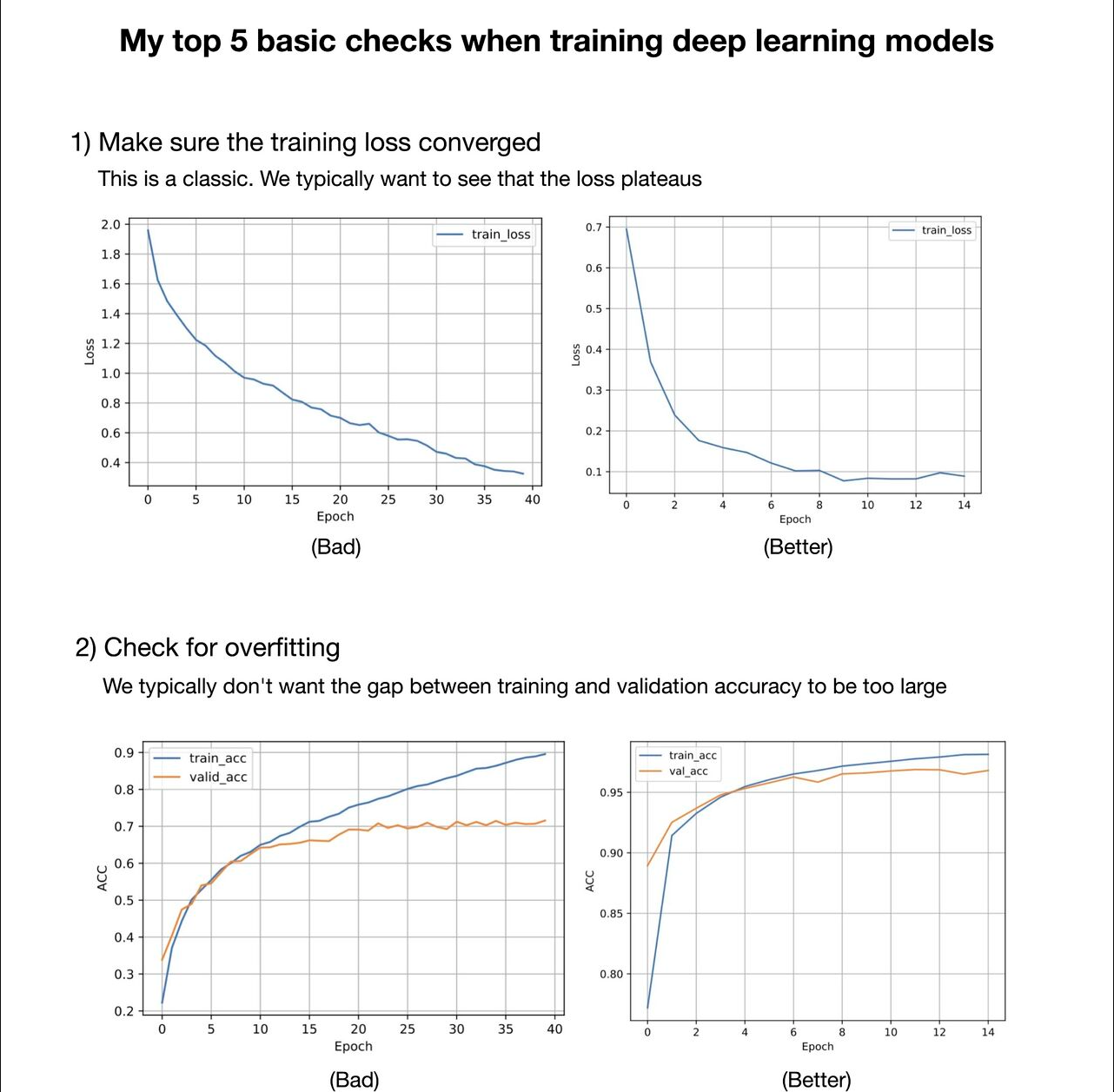
What are some of the basic things you should watch out for when training deep neural networks? Here are my top 5:
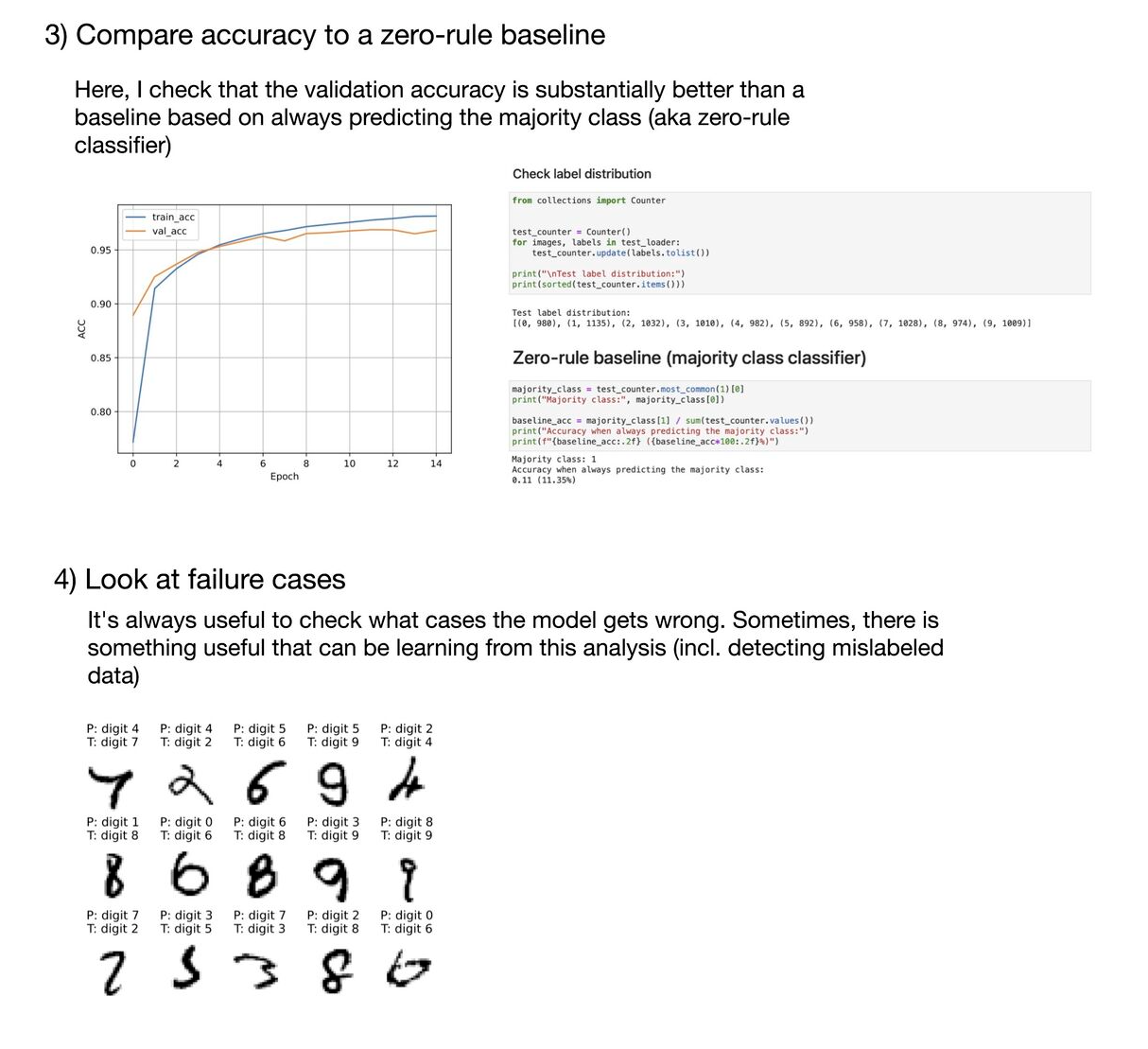
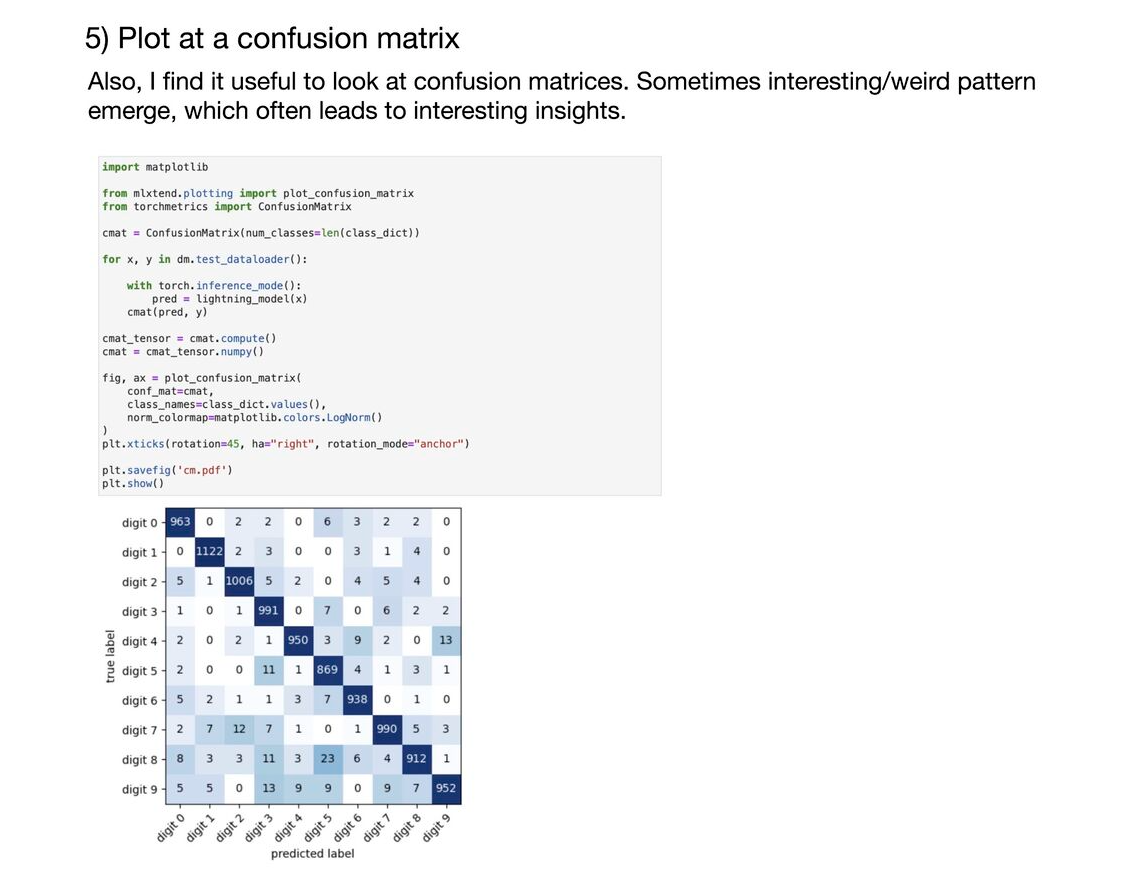
1) Make sure training loss converged 2) Check for overfitting 3) Compare accuracy to a zero-rule baseline 4) Look at failure cases 5) Plot at a confusion matrix 6) Make sure your model is able to overfit to a small dataset (like 1000 examples) or a single minibatch. (Tip 3 from Andrej Karpathy’s “A Recipe for Training Neural Networks” https://lnkd.in/gvfgqxTQ) 7) Check whether layers have converged to a good alpha (e.g., using weightwatcher). See https://lnkd.in/gHDHDXAu 8) Check how confident your model is on out-of-distribution data (a common problem for neural nets); one out of many papers on this topic: https://lnkd.in/gsjSVYcd 9) Apply your model to new data from the application domain (e.g., if you train a handwritten digit classifier, try your own handwritten digits)
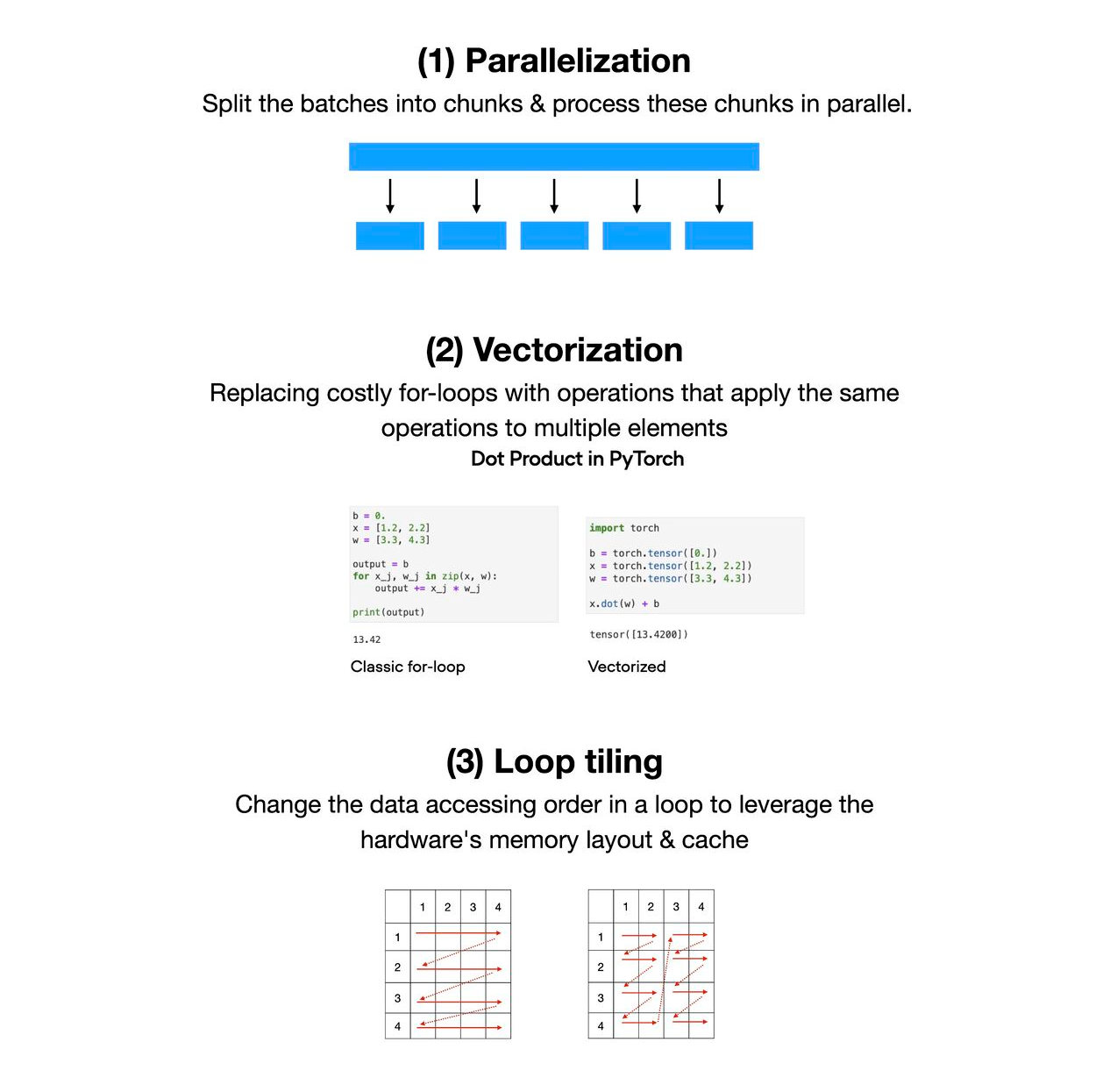
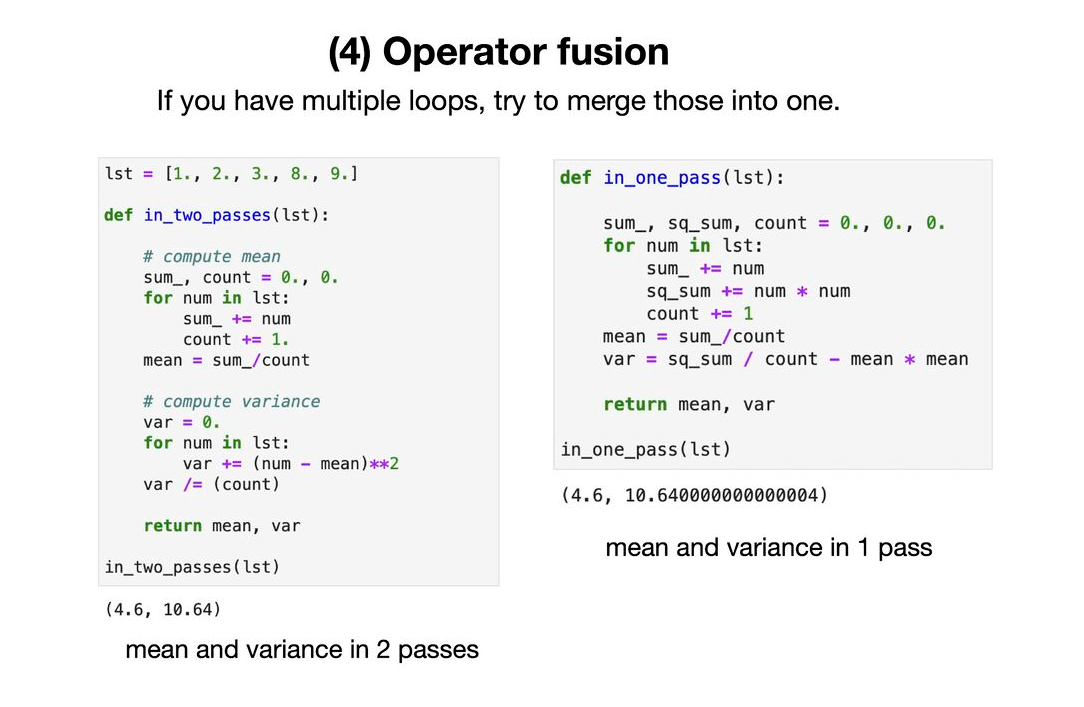
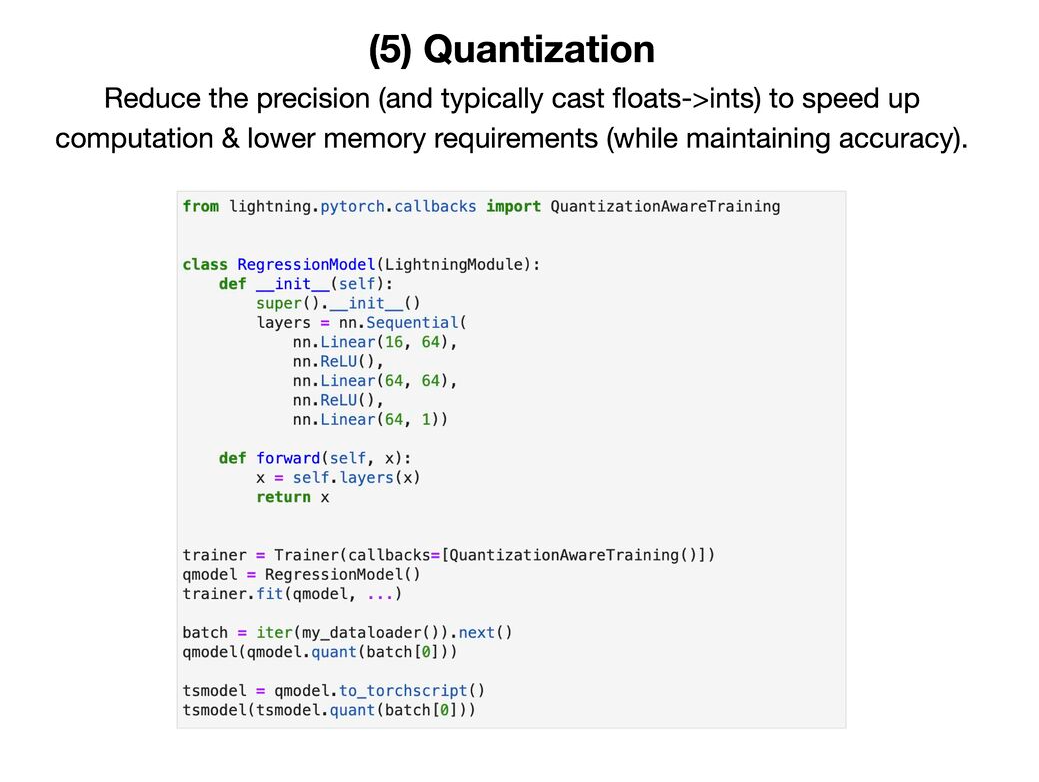
A list of 5 techniques to optimize deep neural network model performance during inference
Links for MLOPS
Courses:
- Made With ML: https://madewithml.com/
- Coursera - DeepLearning.AI MLOps specialization: https://lnkd.in/gVrxJqQS
- Coursera - Google MLE certificate: https://lnkd.in/gVNNpzzR
- MLOps Zoomcamp: https://lnkd.in/gt2QH7sz
- Berkeley Full Stack Deep Learning: https://lnkd.in/gG8jR2Vg
- Udemy - Deployment of Machine Learning Models: https://lnkd.in/g7TpQ_dM
- Udemy - MLOps Fundamentals CI/CD/CT: https://lnkd.in/gkW9Gkrj
- Udemy - Testing and Monitoring Machine Learning Model Deployments: https://lnkd.in/g4qAw9Hq
- MLOps Certification Training: https://lnkd.in/guRq627D
- MLOps Engineering on AWS: https://lnkd.in/g-tnpKuY
- AWS Machine Learning University: https://lnkd.in/g-jjMk3Q
- EdX - MLOps with AWS: https://lnkd.in/gYE37jDN
- MLOps Course Certification: https://lnkd.in/gDGUXPR7
- GCP MLOps Fundamentals: https://lnkd.in/geNjGNyP
- Stanford MLSys Seminar Series: https://lnkd.in/gdNWPceY
- DataRobot MLOps Starter: https://lnkd.in/gMQYSitX
- Udacity - Become a Machine Learning Engineer for Microsoft Azure: https://lnkd.in/garedV7K
- LinkedIn - Applied Machine Learning Foundations: https://lnkd.in/ghWPcHHq
- Unifying MLOps at Microsoft: https://lnkd.in/gsKyb3Dq
Books:
- Machine Learning Engineering: https://lnkd.in/gjyw35fh
- Introducing MLOps: https://lnkd.in/gZzh_cYz
- What Is MLOps?: https://lnkd.in/g_vgYKMh
- Practical MLOps: https://lnkd.in/gbGnj7ss
- Reliable Machine Learning: https://lnkd.in/gCvje923
- Designing Machine Learning Systems: https://lnkd.in/gRmEkHwj
Repos:
- Awesome MLOps: https://lnkd.in/gqCWbuQT
- Awesome Production Machine Learning: https://lnkd.in/g8zfBRSB
Architecture
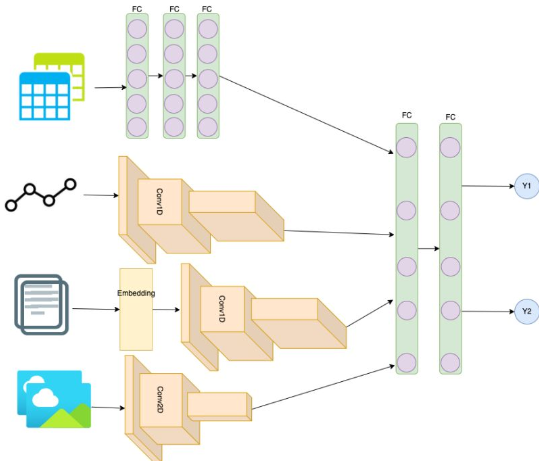
Deep Learning requires much more of an ARCHITECT mind set than traditional Machine Learning. In a sense, the feature engineering work has been moved to the design of very specialized computational blocks in DL using smaller units (LSTM, Convolutional, embedding, Fully connected, …). I always advise to start with a simple net when architecting a model such that you can build your intuition. Jumping right away into a Transformer model may not be the best way to start.
DL is very powerful in the case of multi-modal input data: time series, tabular data, text data, image data. One approach is to encode all those different data types into a simple vector and feed that into a logistic regression (LogReg) or a linear regression (LR) (or with more fully connected layers to add non-linearity) depending on if you need to perform classification or regression. When developing a simple model, start with a low capacity network and increase little by little the complexity to reduce the bias while adding regularization to keep the variance low.
A conv layer is meant to learn local correlations. Multiple successive blocks of conv and pooling layers allows to learn the correlations at multiple scales and they can be used on image data (conv2d), text data (text is just a time series of categorical variables) or time series (conv1d). For example you can encode an image using a series of conv2d and pooling layers like in VGG (https://lnkd.in/g6Jp6NmD, https://lnkd.in/gDjUGWFE). You can encode text data using an embedding (pretrained obviously https://lnkd.in/gt5N-i6R) followed by a couple of conv1d layers. And you can encode a time series using series of conv1d and pooling layers.
I advise against using LSTM layers when possible. The iterative computation doesn’t allow for good parallelism leading to very slow training (even with the Cuda LSTM). For text and time series ConvNet are much faster to train as they make use the of the matrix computation parallelism and tend to perform on par with LSTM networks (https://lnkd.in/g-6Z6qCN). One reason transformers became the leading block unit for text learning tasks, is its superior parallelism capability compared to LSTM allowing for realistically much bigger training data sets.
In general it is not too hard to train on multi-modal data. As a simple example:
- time series vector = Pool1d(Conv1d(Pool1d(Conv1d(time series))
- image vector vector = Pool2d(Conv2d(Pool2d(Conv2d(image data))
- text vector = Pool1d(Conv1d(Pool1d(Conv1d(Embedding(text data)))
- tabular data vector = FC(FC(tabular data)) => X = FC(FC(time series vector, tabular data vector, text vector, image vector)) The nice thing with DL, you can train on multiple targets at once using multiple target heads: Y_1 ~ LR(X), Y_2 ~ LogReg(X)
Recommender Engine
Netflix matrix factorization Recsys paper A multi-task framework for metric learning with common subspace Linkedin linkedy DGCN: Diversified Recommendation with Graph Convolutional Networks recsys
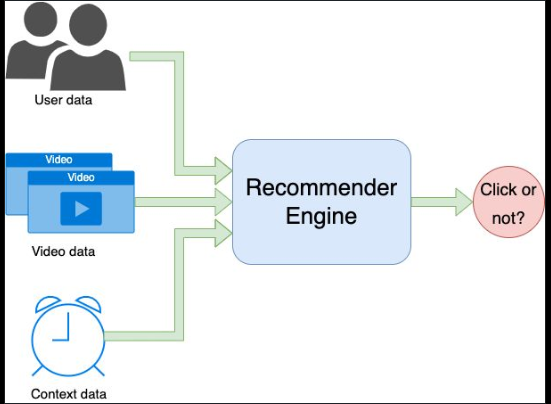
Recommender Engine might be one of the most PROFITABLE Machine Learning Model paradigms right now but I think it doesn’t get the recognition it deserves! There are many ways to generate money with ML but the niche business applications where Rec Engines are typically used makes it a more certain high ROI ML application in general. The business value of Rec engines is clear: personalized matching between a user and a product. That is the bread and butter of many big tech companies:
- search engine: Google search, Amazon Product Search, …
- Ads ranking: Google and Meta generate 65% of the world digital ad revenue
- Feed ranking: FB, Instagram, LinkedIn, …
-
Product Recommendation: Netflix’s landing page, …
-
The modern approach to Rec Engine can be tracked back to the 2006 Netflix Recommendation contest (https://lnkd.in/ds6WWEG3) where the Latent Matrix Factorization method won second place (https://lnkd.in/dz4q7Xnx). Surprise is a nice python implementation: http://surpriselib.com/. In a supervised learning term, we use user data, product data and context data as input to estimate the affinity of a user to a product: affinity ~ F(user data, product data, context data). Those algorithms are peculiar because we want to use the same user and product population at training time than inference time: in a sense, we want to overfit on the user behavior.
- Now Deep Learning dominates the field by extending on the original linear models and it led to many new NN architectures. Embeddings provide a natural mechanism to featurize the large users and products spaces and their related behavior history. Some architecture examples:
- Multi gate Mixture of Experts for Youtube videos recommendation: https://lnkd.in/dE6XZvJx
- Multi-Task Metric Learning for multi-staged inference when the product space is too large: https://lnkd.in/dSpiR9GA, https://lnkd.in/dZErXbpE
- Two Tower models for retrieval: https://lnkd.in/dh3Xtmyc
- Multi-tower model for ads ranking in Pinterest: https://lnkd.in/d_uPNSAH
- Diversified recommendation with Graph Convolutional Networks: https://lnkd.in/dfcVYeDJ
-
Autoencoder-based recommender: https://lnkd.in/dET64Pvs
- This is an interesting space and a valuable expertise to have those days. I wish there were more textbooks on the subject! One to get started: https://lnkd.in/deMyYw5e
How to detect Data Drift
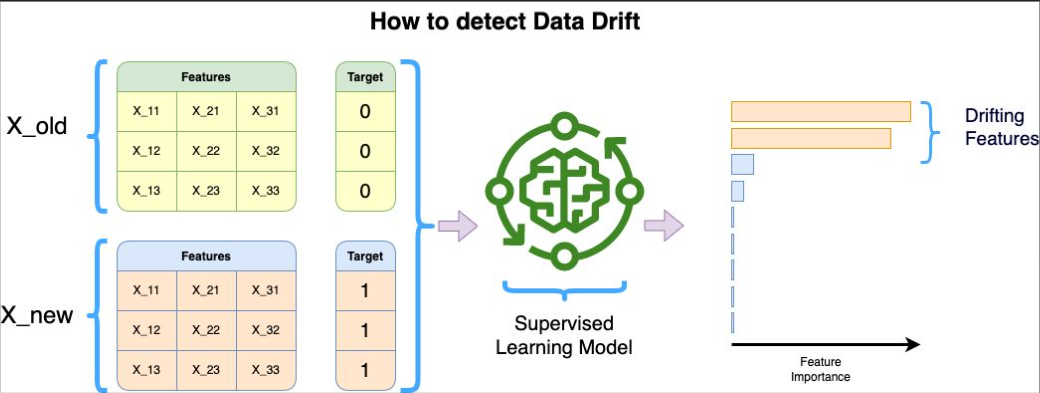
- There is one simple technique I like to use to detect DATA DRIFT for Machine Learning applications. First, take a current data set and let’s call it X_now. Then let’s take an old data set and let’s call it X_old. You could imagine having different X_old for different time scales: 1 week ago, 1 month ago, 1 year ago, … Let’s now create an artificial target Y_now where all the values are 1 and another Y_old where all the values are 0. Y_old would be paired with the X_old samples and Y_now with the X_now ones. We can concatenate X_now with X_old and Y_now with Y_old:
X = [X_now, X_old]
Y = [Y_now, Y_old]
Now take that data (X,Y) and train a Supervised Learning algorithm that has a good built-in Feature Importance measurement process. For example, I like to take a Random Forest algorithm that has typically a Feature Importance measured as a mean entropy or Gini gain per split through the whole forest. If one or few features are coming out as having a high feature importance to predict that artificial target, this is a strong evidence that those features have been drifting over time!
What techniques do you like to use to detect Data Drift?
One common technique to detect data drift in machine learning applications is to compare the statistical properties of different data distributions over time. Here are a few techniques commonly used to detect data drift:
-
Monitoring Descriptive Statistics: Track key descriptive statistics, such as mean, standard deviation, or skewness, for relevant features in the dataset. Any significant changes in these statistics over time can indicate data drift.
-
Statistical Hypothesis Testing: Apply statistical tests to compare the distributions of different datasets. For example, you can use the Kolmogorov-Smirnov test, the Anderson-Darling test, or the Mann-Whitney U test to check if the data distributions are significantly different.
-
Drift Detection Methods: There are specific drift detection methods designed to identify changes in data distributions. Examples include the Drift Detection Method (DDM), the Page-Hinkley Test, the Sequential Probability Ratio Test (SPRT), and the Cumulative Sum (CUSUM) algorithm. These methods analyze incoming data incrementally and raise an alarm when a significant change is detected.
-
Machine Learning Model Monitoring: Track the performance of your machine learning models over time. Monitor metrics such as accuracy, precision, recall, or the area under the ROC curve (AUC-ROC). A significant drop in performance can indicate a drift in the data.
-
Feature Importance Analysis: Use feature importance techniques to assess which features have the most impact on model predictions. If the importance of certain features changes significantly over time, it suggests that those features may be drifting.
-
Domain Expert Knowledge: Incorporate domain expertise to identify potential sources of data drift. Experts can provide insights into changes in the data-generating process, external factors impacting the data, or shifts in user behavior that might affect the data distribution.
- It’s important to note that data drift detection is an ongoing process, and there is no one-size-fits-all solution. Different techniques may be more suitable depending on the specific problem, the nature of the data, and the available resources. Combining multiple methods and continuously monitoring the data can help you identify and address data drift in machine learning applications.
- The technique described in the provided explanation is one way to detect data drift by leveraging supervised learning algorithms and feature importance analysis. The reasoning behind setting Y_old (target for old data) to all 0 and Y_now (target for current data) to all 1 is to create an artificial target variable that represents a binary classification problem. This allows us to train a supervised learning algorithm to predict whether a data sample belongs to the old or new dataset.
- By concatenating X_old with X_now and Y_old with Y_now, we create a combined dataset (X, Y) where the algorithm can learn to differentiate between the old and new data samples. The intention is to analyze the feature importance provided by the trained model. If specific features are assigned high importance in predicting the artificial target (i.e., distinguishing between old and new data), it suggests that those features have changed or drifted over time.
- Data drift refers to changes in the underlying data distribution over time, which can impact the performance and reliability of machine learning models. By training a model to distinguish between old and new data and examining the feature importance, we can identify which features contribute significantly to discriminating between the datasets. If the importance of certain features is high, it indicates that those features have undergone substantial changes or drift, potentially influencing the model’s performance when applied to new data.
- In summary, by training a model to discriminate between old and new data and analyzing the feature importance, this technique aims to identify features that have changed over time, serving as an indicator of data drift. It provides insights into which features contribute most to the distinction between datasets and highlights potential shifts or inconsistencies in the data that might affect model performance.
Kolmogorov-Smirnov test
- The Kolmogorov-Smirnov test, often abbreviated as the K-S test, is a nonparametric test used in statistics to determine whether two underlying one-dimensional probability distributions differ, or to compare a sample with a reference probability distribution. It is widely used for comparing two empirical distributions or an empirical distribution against a theoretical one.
- The test is based on the maximum distance between these distributions, specifically focusing on their cumulative distribution functions (CDFs). Here’s a brief overview of how it works:
- Null Hypothesis (H0): The null hypothesis states that there is no difference between the two distributions being compared.
- Test Statistic: The K-S test calculates the maximum difference (D) between the two cumulative distribution functions. For two empirical distributions, this is typically visualized as the greatest vertical distance between the two CDFs.
- Critical Value and P-Value: Based on the test statistic and the sample size, a p-value is calculated. This p-value indicates the probability of observing such a difference if the null hypothesis were true. If the p-value is less than a chosen significance level (commonly 0.05), the null hypothesis is rejected, suggesting a significant difference between the distributions.
- Two-Sample vs One-Sample Test: The K-S test can be applied in two forms: the one-sample K-S test compares a sample with a reference probability distribution, and the two-sample K-S test compares two empirical distributions.
- Advantages and Limitations: The test is nonparametric, requiring no assumption about the distribution of data, making it versatile. However, it is less powerful than some parametric tests when their assumptions are met, and it might not be suitable for discrete distributions or small sample sizes.
- The K-S test is widely used in various fields such as finance, environmental science, and engineering, where understanding the distribution of data is crucial.
Prevent data drift
- Designing machine learning infrastructure systems to systematically prevent or at least detect data drift is crucial for maintaining the accuracy and reliability of ML models over time. Data drift refers to the change in the model’s input data distribution over time, which can degrade the model’s performance. Here’s how you can design ML infrastructure to address this challenge:
1. Data Monitoring
- Implement Continuous Data Monitoring: Set up systems to continuously monitor data quality and characteristics. This includes tracking changes in data distributions, outliers, and missing values.
- Automated Alerts: Develop automated alerting mechanisms that notify relevant teams when significant data drift is detected.
2. Versioning and Data Lineage
- Data Versioning: Implement data versioning to track changes over time. This helps in identifying when and how the data has changed.
- Maintain Data Lineage: Keeping records of data lineage allows teams to trace back through the data pipeline to identify sources of drift.
3. Periodic Model Evaluation
- Regular Model Performance Checks: Schedule regular evaluations of the model against current data to check for performance degradation.
- Benchmarking Against Fresh Data: Regularly test the model with new, unseen data to ensure it still performs well under current conditions.
4. Robust Data Pipeline
- Build Robust Data Pipelines: Ensure that the data pipeline is robust against common issues like missing data, format changes, or pipeline failures.
- Automated Data Quality Checks: Incorporate automated checks for data quality at various points in the pipeline.
5. Adaptive Model Training
- Incremental Learning: Implement models capable of incremental learning, where they can adapt to new data patterns over time.
- Automated Retraining Pipelines: Set up automated pipelines for retraining models with new data.
6. Feedback Loops
- Incorporate User Feedback: Establish mechanisms for incorporating user feedback into the model training process.
- Post-Deployment Monitoring: Continuously monitor the model’s performance in the production environment and use this feedback for improvements.
7. Experimentation and A/B Testing
- A/B Testing: Conduct A/B tests to compare the performance of models under different data scenarios.
- Experimentation Framework: Develop a robust experimentation framework to test models under various conditions.
8. Documentation and Governance
- Maintain Comprehensive Documentation: Keep detailed documentation of models, data sources, and changes over time.
- Data Governance: Establish strong data governance policies to maintain data quality and integrity.
9. Collaborative Approach
- Cross-Functional Teams: Encourage collaboration between data scientists, engineers, and domain experts to better understand and mitigate data drift.
- Training and Awareness: Provide training and awareness programs for team members to recognize and address data drift.
10. Use of Advanced Tools and Technologies
- Leverage Advanced Monitoring Tools: Use advanced tools that can detect data drift using statistical methods and machine learning techniques.
-
Scalable Infrastructure: Ensure that the infrastructure is scalable to handle increasing data volumes and complexity.
- By combining these strategies, ML infrastructure can be designed to not only detect but also prevent data drift, ensuring that models remain effective and reliable over time.
Explain reasoning behind offline and online gap in ML system evaluation and mitigation strategies?
- The gap between offline and online evaluation in machine learning (ML) systems can significantly impact the performance and reliability of these systems in real-world applications. This gap is primarily due to differences in the environments and data used for training and testing these systems. Here are the main reasons behind this gap and some strategies to mitigate it:
Reasons Behind the Gap
-
Data Distribution Differences: Offline evaluations often use historical data, which might not represent current or future conditions. Online evaluations, in contrast, deal with real-time data that may include new patterns not present in the training set.
-
Feedback Loop: Online systems often have a feedback loop where the system’s outputs can influence future inputs (e.g., user interactions). This dynamic is usually absent in offline evaluations.
-
Scale and Complexity: The complexity and scale of real-world data can be much higher than the data used in offline settings. Online systems may encounter more varied and unpredictable scenarios.
-
User Behavior: User interactions and behavior can significantly differ from what is modeled or anticipated during offline evaluations. Users may react to the system’s outputs in unforeseen ways.
-
Latency and Performance Constraints: Online systems need to adhere to stricter performance and latency requirements, which might not be fully simulated or considered in offline tests.
Mitigation Strategies
-
Continuous Monitoring and A/B Testing: Implementing A/B testing and continuous monitoring in the live environment helps in understanding how the model performs in real-world scenarios and adjusting it accordingly.
-
Data Recency and Relevance: Ensuring the data used for offline evaluation is recent and relevant can help reduce the gap. This includes updating the datasets regularly to reflect current trends and patterns.
-
Simulating Online Conditions: Enhancing offline evaluation by simulating online conditions as closely as possible, including user behaviors, feedback loops, and real-world constraints.
-
Model Updating and Re-training: Regularly updating and re-training the model with new data collected from the online environment can help the model adapt to changing patterns and behaviors.
-
User-Centered Testing: Incorporating user studies or testing that involves actual user interactions can provide insights that purely data-driven offline tests might miss.
-
Hybrid Approaches: Combining both offline and online evaluation methods to balance the strengths and weaknesses of each approach.
-
Feature Flags and Canary Releases: Gradually rolling out new models or features to a small subset of users before a full deployment can help in identifying issues early.
-
Robustness and Stress Testing: Conducting robustness and stress testing under various simulated conditions can prepare the system for unexpected scenarios.
- By applying these strategies, the gap between offline and online evaluation can be narrowed, leading to more reliable and effective machine learning systems in real-world applications.
How do wide and deep models handle feature crossing in recommender systems?
How to decompose Bias and Variance from the Data
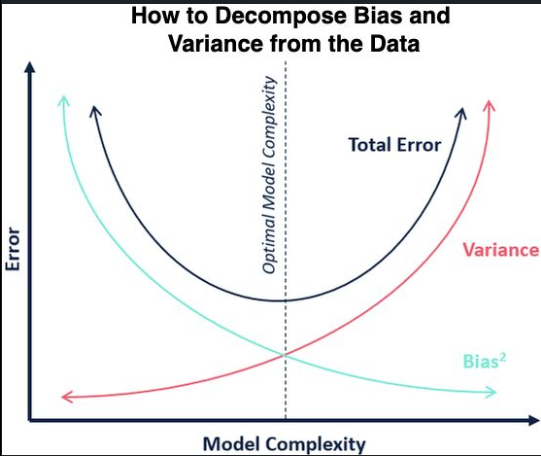
Have you ever tried to compute the BIAS and VARIANCE separately from the data? It is not as simple as one may think! I think we all know the typical decomposition formula (https://lnkd.in/gjQ3n7fj):
E[(y - f(x))^2] = Bias[f]^2 + Var[f] + sigma^2 with Bias[f] = E[f(x)] - f(x)
But did you realize that the Expected value and Variance range over different realizations of the training data D = (X, Y) sampled from the same probability distribution P(X,Y)? To obtain the Mean Square Error (MSE) you need then to run an expected value over the instance distribution this time
MSE = E_x[E[(y - f(x))^2]]
Estimating E_x[.] is easy, you just need to run a sum over the test set: sum(.) / N, where N is the number of samples in the test set. But how do you go about the first expectation?
One way I find intuitive to understand (https://lnkd.in/g49Q9Tjr) is to create M bootstrap samples of the training data D and to train your learner L on each of those sample. For each instance of the test set you can then predict M different values for each of the trained learners. And then you can estimate the expected value for each instance as
mean = sum_i [ f(x_i) ]/ M variance = sum_i [ (f(x_i) - mean)^2 ]/ (M - 1)
And easily estimate the local Bias and Variance for each instance and then average over all the instances in the test set to get MSE.
The following article compares 3 different methods to estimate the Bias and Variance decomposition on real data: https://lnkd.in/gptRH8gp
Is that something you have been wondering about?
Feature Selection Method
This is a technique I like to perform a quick FEATURE SELECTION for Machine Learning applications. I tend to call it the “Random Bar” method! Let’s assume you have a feature set X and a target Y. Let’s create a random vector V (for example np.random.normal(size=(1, 100))) and append that vector as a new feature to X:
X’ = [X, V]
X’ is just the original feature set with additionally the new random feature. Keep in mind that this new feature cannot possibly help to predict the target Y since it is random! Now, take that data (X’, Y) and train a Supervised Learning algorithm with a Feature Importance measure that is relevant for you application. Intuitively, the mean entropy gain per split of tree based algorithms (Random Forest, Xgboost, …) is a convincing measure of feature importance to me. The statistical fluctuation of the data is such that even the random feature will be attributed a non-zero feature importance by the algorithm, but we know it is artificial. Any feature with a lower feature importance than the random feature has to be useless to predict the target and the features with a higher feature importance are at least better than random noise at predicting the target.
This is especially useful if you have thousands of features and you want to weed out quickly the ones that won’t have any impact in the learning process. This is also a method that can be used for highly non-linear data as opposed to LASSO (for example) that tends to only understand linear relationships in the data. The random feature is a “Random Bar” because this is the minimum bar a feature needs to beat to be a part of the potentially useful features set. Now it doesn’t mean there are not additional features that could be beneficial to further remove to optimize your model. Do you know if this method has a more jargon-y name?
For typical recommendation system, a common practice is to continuously train the model. Suppose that we launched a 6 model ago and we have continuously trained it. Consider that if we trained a month starting off with the 6 month ago checkpoint and trained with 3 months of fresh data. How do we use the production model to make the new model with 3 months of data better?
- Here are a few ways to leverage the production model to improve a new model trained on more recent data:
- Use the production model as a starting point - initialize the new model with the weights from the production model rather than random initialization. This allows the new model to benefit from what was already learned.
- Employ distillation - use the predictions from the production model as soft targets to regularize the training of the new model. This helps transfer knowledge from the production model.
- Combine outputs - average or ensemble the predictions from both models. The production model provides a historical viewpoint while the new model incorporates latest trends.
- Focus new model training on weaknesses - use the production model to find examples the new model gets wrong. Focus sampling and regularization techniques on those cases during training.
- Update production model incrementally - periodically update the production model with new data rather than training a separate model. This allows continuous integration of new data to an already robust model.
- The key is leveraging the existing production model as an additional source of knowledge and regularization for training improved models, rather than training each new model from scratch. The production model encapsulates previously learned patterns.
How are ID features handled in LLM recommender models?
- Here are some common ways ID features are handled in large language model (LLM) based recommender systems:
- Hash Encoding - ID features like user_id or item_id are hashed to an embedding space. This embedding can be concatenated to the other feature embeddings and input to the LLM.
- Learned Embedding - The model learns an embedding lookup table for ID features. The ID embeddings are concatenated with other features as input to the LLM.
- Entity Embeddings - ID features are treated as entities. The model leverages a pre-trained entity embedding table like from knowledge bases.
- Contextualization - The ID features are converted to natural text descriptions. For example, user_id=1525 -> “User is a 28 year old male from New York City”. This text is concatenated to input.
- Metadata Enrichment - ID features are used to retrieve associated meta data like user profiles or item attributes. This metadata is encoded as text and provided as additional context to the LLM.
- Cross-Attention - Self-attention layers in the LLM can use ID embeddings as an additional “memory” for the model to cross-attend to. This allows modeling interactions between IDs.
- Personalization Layers - Dedicated personalization or ranking layers after the base LLM can take ID embeddings as input for personalized ranking.
- The overall goal is to represent IDs in a way that the model can effectively incorporate them into reasoning about user-item interactions and preferences. Hashing, embeddings and text contextualization are common techniques for encoding ID features into the LLM input.
Self Instruct aligning language models with self generated instructions
Sergio Valmorisco Sierra Sergio Valmorisco Sierra • 2nd Global Senior Data Scientist at JLL 3h • 3 hours ago
Follow
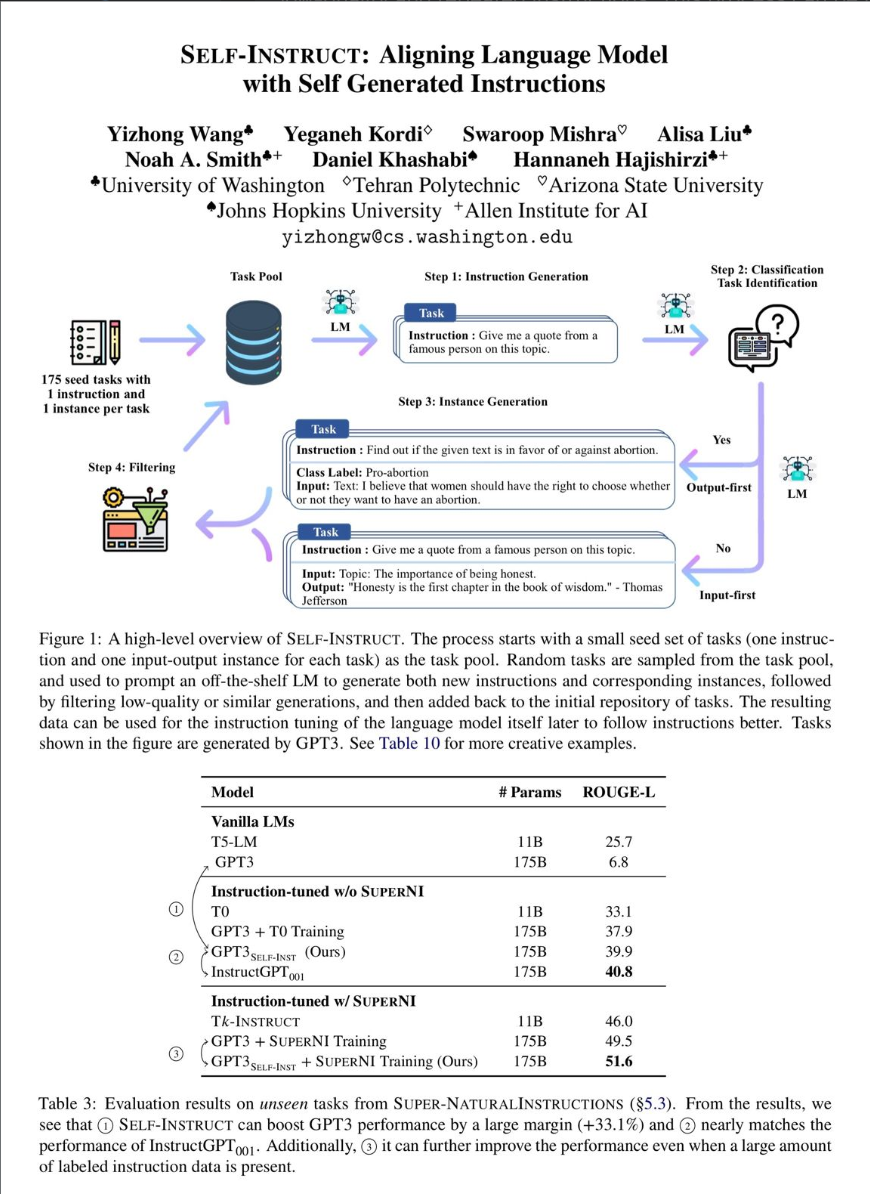
Large “instruction-tuned” language models (finetuned to respond to instructions) have demonstrated a remarkable ability to generalize zero-shot to new tasks. Nevertheless, they depend heavily on human-written instruction data that is limited in quantity, diversity, and creativity, therefore hindering the generality of the tuned model. In this work, the authors introduce SELF-INSTRUCT, a semi-automated process for instruction-tuning a pretrained LM using instructional signals from the model itself.
The overall process is an iterative bootstrapping algorithm, which starts off with a limited (175 in their study) seed set of manually-written instructions that are used to guide the overall generation. In the first phase, the model is prompted to generate more broad-coverage instructions that define (often new) tasks. Given the newly-generated set of instructions, the framework also creates input-output instances for them, which can be later used for supervising the instruction tuning. Finally, various measures are used to prune low-quality and repeated instructions. This process can be repeated for many interactions until reaching a large number of tasks.
Applying their method to vanilla GPT-3, the authors demonstrate a 33% absolute improvement over the original model on the SUPER-NATURALINSTRUCTIONS dataset, on par with the performance of InstructGPT001, which is trained with private user data and human annotations. For further evaluation, they curate a set of expert-written instructions for novel tasks, and show through human evaluation that tuning GPT-3 with SELF-INSTRUCT outperforms using existing public instruction datasets by a large margin, leaving only a 5% absolute gap behind InstructGPT001.
Code and data: https://lnkd.in/d_Wd52Uu Paper: https://lnkd.in/dS8wuBBh
How do you handle hashing for a large billion-scale ID cardinality?
- Here are some techniques to handle hashing large cardinality ID features in billion-scale datasets:
-
Use a 64-bit or 128-bit hash function: MD5, SHA-1, SHA-256 etc. The large output space can accommodate billions of IDs with low collision probability.
-
Use multiple hash functions and concatenate the hashes. For example, take MD5 + SHA-1 hashes to get a 128 bit hash. This further reduces collisions.
-
Use locality sensitive hashing (LSH) to map similar IDs to same buckets with high probability. Makes model learning efficient.
-
Use modulo N hashing to bucket IDs into N buckets. Choose N smartly to distribute IDs while fitting in memory.
-
Maintain an LRU cache of recent/frequent IDs for quick lookup. Assign hash on first occurrence. Handles skewed distributions.
-
Use consistent hash functions so hashes don’t change as data scales. For example, farmhash, xxhash.
-
Store hashes in sparse matrix format with IDs as keys for memory efficiency.
-
Preprocess to assign hashes and save mapping to disk. Load portions during training as needed.
-
Learn multiple hash tables with different hash functions. Adaptively pick hash to balance load.
- The key principles are using long hash outputs, multiple hash functions, bucketing techniques, caching for skewed data, and intelligent memory/disk management to make billion-scale ID hashing feasible.
What kind of feature crossing techniques in recommender systems?
-
Polynomial Features - Create new features by taking all polynomial combinations of original features like user_id x item_id, user_id x time etc.
-
Feature Hashing - Hash the concatenated values of features to generate cross features like hash(user_id + item_category).
-
Embeddings - Learn joint embeddings for feature combinations like user_id + item_id. Useful for high cardinality categorical features.
-
Multi-way Interactions - Explicitly model high-order interactions between multiple features using tensor/factorization machines, deep crossing networks etc.
-
Knowledge Graphs - Model relationships between different features via knowledge graph connections. Allows feature crossing via graph traversals.
-
Neural Networks - Deep neural nets with cross-layer connections can learn implicit feature crosses and interactions.
-
Automatic Crossing - Use feature transformation techniques like FTRL to automatically construct and select useful crosses.
-
Domain-driven Crossing - Combine features informed by domain knowledge like user_geo x item_category for location-based personalization.
-
The goal is to effectively capture the interactions between different features to create better recommendation models. Techniques range from manual crosses to learned models like deep nets that implicitly cross features through non-linear transformations and hidden layers.
ANN and it’s selection criteria
Approximate Nearest Neighbor (ANN) algorithms are essential in machine learning for efficiently finding close neighbors to a query point in high-dimensional spaces. Unlike exact nearest neighbor searches, which can be computationally expensive and slow, ANNs trade off a bit of accuracy for significant gains in speed and memory efficiency. This is particularly useful in large-scale applications like recommender systems, computer vision, and high-dimensional data clustering. Here’s an overview of ANN and the selection criteria for these algorithms:
Approximate Nearest Neighbors (ANN)
Key Concepts
- Speed vs. Accuracy Trade-off: ANN algorithms prioritize speed and computational efficiency over exact accuracy in finding the nearest neighbors.
- High-Dimensional Spaces: They are particularly useful in high-dimensional spaces where the curse of dimensionality makes exact nearest neighbor searches impractical.
Common Algorithms
- Locality-Sensitive Hashing (LSH): Uses hashing to bucket points such that the probability of collision is higher for points which are close to each other.
- KD-trees and Ball Trees (for Moderate Dimensions): Effective in lower to moderate dimensional spaces.
- Hierarchical Navigable Small World (HNSW): Gains popularity for its balance between search efficiency and accuracy.
- Product Quantization: Divides the space into a Cartesian product of low-dimensional subspaces and quantizes each subspace separately.
- Tree-based Methods (like Annoy): Build tree structures to partition the space and efficiently traverse these trees to find nearest neighbors.
- Graph-based Methods: Create graphs where nodes represent data points, and edges connect each point to its nearest neighbors.
Selection Criteria for ANN Algorithms
1. Dimensionality of Data
- High vs. Low Dimensions: Some algorithms perform better in lower-dimensional spaces (e.g., KD-trees) while others are tailored for high-dimensional data (e.g., LSH, HNSW).
2. Dataset Size
- Large Datasets: For very large datasets, consider memory-efficient algorithms like HNSW or product quantization.
- Small to Medium Datasets: Tree-based methods like Annoy or Ball Trees might be sufficient.
3. Query Speed
- Latency Requirements: If low latency is crucial, prioritize algorithms known for their high-speed querying, like HNSW or Annoy.
4. Accuracy Requirements
- Precision-Recall Trade-off: Some applications might tolerate a lower recall for a significant gain in speed, while others might need higher precision.
5. Update Frequency
- Dynamic vs. Static Datasets: If the dataset changes frequently (insertions/deletions), consider whether the algorithm supports dynamic updates efficiently.
6. Memory Usage
- Hardware Constraints: Evaluate the memory footprint of the algorithm, especially important in resource-constrained environments.
7. Ease of Implementation and Maintenance
- Complexity: Consider the complexity of implementing and maintaining the algorithm, including the availability of libraries and support.
8. Scalability
- Scaling with Data Size: Ensure the algorithm scales well with the increase in data size, both in terms of memory and computational efficiency.
9. Parallelism and Distribution
- Support for Parallel Processing: For large-scale applications, consider if the algorithm can leverage multi-core processors or distributed computing environments.
Conclusion
The choice of an ANN algorithm depends on a delicate balance of these factors, tailored to the specific needs and constraints of your application. It’s often beneficial to conduct empirical tests with a subset of your data to determine which algorithm provides the best trade-off between speed, accuracy, and resource consumption for your particular use case.
How do we handle categorical features in recommender systems?
-
Handling categorical features in recommender systems is a key aspect of the model building process, as these systems often deal with a large amount of categorical data, such as user IDs, item IDs, genres, locations, etc. The way these features are processed and integrated into the model can significantly impact the system’s performance. Here are some common strategies for handling categorical features in recommender systems:
-
Encoding - Convert categories to numeric ids or one-hot vectors. Common encodings are label encoding, one-hot encoding, mean encoding, etc.
-
Embeddings - Map categories to low dimensional dense vector embeddings. Learned jointly with model. Captures semantic meaning.
-
Hashing - Hash categories to numeric buckets to handle high cardinality. Useful when number of categories is large.
-
Clustering - Group infrequent categories into clusters. Reduces sparsity.
-
Count Features - Derive useful count statistics for each category like frequency, co-occurrence counts etc.
-
Smoothing - Apply smoothing techniques like adding small constant to infrequent categories to reduce sparsity.
-
Grouping - Manually group related categories into higher level categories based on domain knowledge. Reduces cardinality.
-
Segmentation - Divide users/items into segments based on categories for segment-specific modeling.
-
Decision Trees - Use tree-based models like XGBoost that can handle categorical splits.
-
Regularization - Use regularization when training models to avoid overfitting sparse categories.
-
The main goals are reducing sparsity, encoding semantics, and handling high cardinality. This allows the model to effectively leverage categorical information for making better recommendations.
-
Association retrieval is a method proposed by, “Solving the Sparsity Problem in Recommender Systems Using Association Retrieval” , which involves exploring transitive associations between users based on their feedback data. This method aims to alleviate the sparsity problem and improve recommendation quality.
Is there any downside to Feature Hashing (Hashing Trick)?
- Feature Hashing, also known as the hashing trick, is a technique used in machine learning to efficiently encode high-dimensional categorical data into a lower-dimensional space. While it offers several advantages, particularly in terms of memory efficiency and scalability, there are some downsides to be aware of:
1. Collision Risk
- Hash Collisions: Since the hashing trick maps a potentially large number of features to a smaller number of dimensions, different original features can end up with the same hash value. This is known as a collision.
- Information Loss: Collisions can lead to information loss, as the model cannot distinguish between features that have been hashed to the same value.
2. Irreversibility
- Loss of Original Values: Once features are hashed, it’s not possible to reconstruct the original values. This can be a significant downside when interpretability or further analysis of original features is needed.
3. Tuning Hash Space Size
- Determining Dimensions: Choosing the appropriate size for the hash space is a trade-off. A smaller size leads to more collisions (and potential loss of information), while a larger size reduces collisions but increases memory and computational requirements.
- No Optimal Rule: There’s no definitive rule for the best size, and it often requires experimentation and domain knowledge.
4. Lack of Weighting Distinction
- Equal Weighting: The hashing trick does not differentiate between features in terms of their importance or frequency. Each feature is hashed independently of its significance.
5. Difficulty in Handling New Features
- Dynamic Feature Set: In scenarios where new features are continuously added, managing the hash function and ensuring consistent hashing for new and old features can be challenging.
6. Potential for Overfitting
- Sparse Features: If the hashed feature space is still relatively high-dimensional and sparse, it can lead to overfitting, especially with models sensitive to high-dimensional spaces.
7. No Native Support for Feature Interactions
- Feature Crosses: The hashing trick doesn’t natively handle feature interactions. Additional steps or models are required to capture interactions between features.
8. Model Dependency
- Algorithm Suitability: The effectiveness of feature hashing can depend on the type of model being used. Some models may work better with hashed features than others.
Conclusion
- Feature Hashing is a powerful tool, especially for handling large-scale and high-dimensional data. However, its suitability depends on the specific requirements and constraints of the machine learning task at hand. The downsides, particularly regarding collisions, irreversibility, and the tuning of hash space size, need to be carefully considered and managed.
How do wide and deep models handle feature crossing in recommender systems ?
- In recommender systems, handling feature interactions, including feature crossing, is crucial for making accurate predictions. “Wide and deep” models, a concept popularized by a research paper from Google, are particularly effective in this regard. Here’s a breakdown of how these models handle feature crossing:
- Wide Component:
- The “wide” part of a wide and deep model is a linear model (like logistic regression).
- It is particularly good at handling explicit feature interactions (feature crossing).
- These interactions are usually hand-engineered and can be based on domain knowledge. For instance, in a movie recommendation system, a crossed feature could be the combination of “user’s age group” and “movie genre”.
- The wide component helps in memorizing specific feature combinations that are useful for the prediction.
- Deep Component:
- The “deep” part is a feed-forward neural network.
- It is capable of learning high-level, abstract representations of data through its hidden layers.
- In the context of feature interactions, the deep network automatically learns implicit feature interactions. As data passes through the layers, the network combines features in various ways, essentially learning which combinations of features (even if not explicitly defined) are meaningful for predictions.
- This part is more about generalization rather than memorization, which complements the wide part.
- Combination of Wide and Deep:
- The key to the wide and deep model is in combining these two approaches.
- While the wide part handles specific, known interactions and memorization of particular feature combinations, the deep part discovers and generalizes the unknown, implicit interactions.
- By combining these, the model can leverage the strengths of both linear and nonlinear approaches.
- The outputs of both the wide and deep components are combined (usually through a sum operation) to make the final prediction.
- Application in Recommender Systems:
- In recommender systems, this approach allows the model to capture specific rules and patterns through the wide component (like “users of a certain demographic tend to like certain types of movies”) while also adapting to complex and subtle user preferences and behaviors via the deep component.
- This results in a more robust and accurate system, capable of handling a wide range of recommendation scenarios.
-
Wide component: The wide linear component explicitly models feature crosses and interactions through techniques like polynomial expansion, embedding crosses, product transformations etc. This memorizes certain cross-features.
-
Deep component: The hidden layers of the deep neural network component automatically learn latent crosses and interactions between features through non-linear transformations and dense embeddings.
-
Shared embedding layer: Having a shared wide-deep embedding layer allows embeddings to represent both singleton features and interactions for the wide and deep parts respectively.
-
Wide input to deep: The wide model component’s crossed features can be provided as additional input to the deep component after the embedding layer to inform the deep model.
-
Deep output to wide: The hidden layers of the deep component can generate new interaction features to expand the input to the wide component.
-
Ensembling: The wide and deep components capture different types of crosses which can then be ensembled or concatenated into final predictions.
- Joint training: End-to-end joint training allows the wide, deep and shared components to handle crosses in a coordinated manner.
- The wide component memorizes cross-features while the deep component generalizes feature interactions. Combining them allows leveraging both memorization and generalization to improve recommendation performance.
Deep and Cross
-
Deep & Cross Network (DCN) is a neural network-based model that effectively combines “Deep” neural network learning and “Cross” feature interactions for recommender systems. Here is how it handles feature crossing:
-
Explicit Feature Crosses: DCN introduces explicit cross layers that take element-wise product between feature embeddings to model interactions. For example, Cross(Embedding(user), Embedding(item))
-
Cross Network: The cross layers are stacked to learn higher-order interactions like Cross(Cross(A,B), C). This cross network is capable of memorizing and generalizing feature crosses.
-
Deep Layers: The standard deep neural network layers learn implicit feature crosses through non-linear transformations and latent interactions.
-
Cross-stitch Units: These units combine the implicit crosses from deep layers and explicit crosses from cross-layers, enabling them to work together.
-
Residual Learning: The input embeddings are added to later cross-layers using residual connections. This allows better gradient flow during training.
-
Joint Training: The entire network comprising deep layers, cross layers and cross-stitch units is trained end-to-end, allowing an integrated model of crosses.
-
In summary, DCN introduces specialized cross-layers to model explicit crosses, which are then combined with deep neural network layers to get both explicit and implicit crosses in an integrated model. The joint training and architecture allows effective learning of crossed features.
What does feature crossing mean? how do you handle high cardinality in data when crossing?
- Feature crossing refers to combining multiple features into a new feature to capture interactions between them. This allows machine learning models to better learn non-linear relationships from the data.
- Feature crossing, also known as feature interaction, is a technique in machine learning where you create new features by crossing (or combining) two or more existing features. The idea is to capture interactions between different features that might be predictive but are not captured when considering the features independently. For example, in a real estate model, crossing “city” and “property type” might reveal patterns specific to apartments in urban areas that wouldn’t be apparent when looking at either feature alone.
- Handling high cardinality in data, especially when performing feature crossing, can be challenging due to the exponential increase in the number of unique feature combinations. High cardinality means a feature has a large number of unique values. Here are some strategies to manage this:
- Some ways to handle high cardinality features for crossing:
- Feature Hashing: Hash the high cardinality features into buckets first before crossing to reduce dimensionality.
- Modular Hashing: Take a modulo of the feature values with some prime number to put them in smaller buckets.
- Embedding Crossing: Learn low-dimensional embeddings for high cardinality features and then cross the embeddings.
- Sampling: Randomly sample from the long tail of infrequent feature values when crossing.
- Frequency-based Crossing: Only cross features that co-occur above a certain frequency threshold.
- Cross Feature Selection: Use regularization or feature selection to determine most useful cross features.
- Two-stage Crossing: First independently embed high cardinality features, then cross the embeddings.
- Locality Sensitive Hashing: Map similar feature values to same buckets before crossing.
- The main idea is to first reduce the cardinality of individual features, then cross the lower-dimensional representations. This allows feasible and useful crossing of high cardinality categorical features like user_ids or item_tags.
For a recommender system’s training data, say we have 100M data samples, 5000 for retrieval, 5 for ranking. For the ranking stage, we want to log features. How best do we log for features since the ones that didn’t get to ranking could also be relevant?
-
Here are a few ideas for how to handle logging of features for a multi-stage recommender system with a large training dataset but small set available for the ranking stage:
-
Cache features from full dataset - Precompute and cache feature transformations like log counts, embeddings etc. for the full dataset. Then lookup for small set.
-
Sample more for ranking - Increase the sample size taken for final ranking stage to better cover full distribution.
-
Reweight by inverse propensity - Assign higher importance weights to less frequent features sampled for ranking.
-
Two-stage model - Train a lightweight model on full data for feature generation, then train ranking model on sample.
-
Learn feature distribution - Model the distribution of features in full dataset. Sample from distribution for ranking set.
-
Hybrid online/offline - Use offline large-scale model to generate candidate features, finetune online with features from ranking sample.
-
Imputation - For missing values in ranking set, impute intelligently using statistics from full data.
-
Generative model features - Use generative models like GANs trained on full data to generate synthetic features for tail items.
-
The key is to leverage the full dataset as much as possible for feature engineering and importance weighting, while dealing with the computational constraints of having a small ranking set. Hybrid online/offline approaches can work well in this case.
-
In a recommender system, especially one using a two-stage approach with retrieval and ranking stages, feature logging is crucial for understanding and improving the model’s performance. The challenge in your scenario lies in effectively logging features for both the small subset of items that reach the ranking stage and those that do not but might still hold relevance. Here are strategies to approach this:
- Log Features at Both Stages:
- Log features for all items at the retrieval stage, not just the 5000 that make it to ranking. This can provide insights into why certain items were selected for ranking and others were not.
- For the ranking stage, log detailed features for the final 5 items. This information is crucial for understanding the final decision-making process of the model.
- Sampling Strategy:
- Given the large dataset (100M samples), consider a sampling strategy for logging. Randomly select a representative sample of items that did not make it to the ranking stage for feature logging. This can help in understanding the characteristics of items that are being filtered out.
- Store Summary Statistics:
- For the large volume of data, it may be impractical to log features for each item. Instead, consider logging summary statistics (like mean, median, mode, etc.) of features across different segments of your dataset.
- Log Feature Distributions:
- Understand the distribution of key features both in the overall dataset and among the items selected for ranking. This could highlight biases or patterns in how the retrieval model selects items.
- Use Counterfactual Logging:
- Counterfactual logging involves logging what would have happened if a different action had been taken. This can be complex to implement but provides valuable insights, especially for understanding the impact of the retrieval stage on the final recommendations.
- Feedback Loop:
- Incorporate user feedback mechanisms to capture data on items that users might have preferred but which did not make it to the ranking stage. This can be achieved through explicit feedback (like ratings) or implicit signals (like click-through rates on different categories).
- A/B Testing:
- Conduct A/B tests with different logging strategies to identify which method provides the most useful insights for your specific recommender system.
- Feature Importance Analysis:
- Regularly perform feature importance analysis to identify which features are most predictive of an item’s success in the ranking stage. Adjust your logging strategy based on these findings.
- Efficient Data Storage:
- Given the volume of data, use efficient data storage and querying mechanisms. Technologies like columnar storage formats (e.g., Parquet) and scalable databases can be beneficial.
- Privacy and Compliance:
- Ensure that your feature logging adheres to privacy laws and regulations, especially if you’re logging user-related data.
- By logging features effectively at both the retrieval and ranking stages, and using a combination of the strategies above, you can gain a more comprehensive understanding of your recommender system’s performance and areas for improvement. Remember, the goal is not just to log as much data as possible but to log strategically to gain actionable insights.
How do we compress features being stored for retrieval and ranking given space would be an issue?
- Compressing features for storage in the context of a recommender system, especially when dealing with large volumes of data for retrieval and ranking, is essential to manage space efficiently. Here are some strategies for feature compression:
- Feature Selection:
- Before thinking about compression, it’s crucial to start with feature selection. Eliminate redundant or irrelevant features. Use techniques like correlation analysis, feature importance ranking, and domain knowledge to keep only the most relevant features.
- Dimensionality Reduction:
- Apply techniques like Principal Component Analysis (PCA), Singular Value Decomposition (SVD), or t-Distributed Stochastic Neighbor Embedding (t-SNE) for numerical features to reduce the number of dimensions while retaining most of the information.
- For categorical features, consider techniques like Truncated SVD or Latent Dirichlet Allocation (LDA).
- Quantization:
- Quantization reduces the precision of the feature values. For instance, you can store floating-point numbers as 16-bit half-precision floats instead of 32-bit or 64-bit, reducing the size by half or more.
- Sparse Representations:
- Use sparse formats for data storage, especially when dealing with features that have a lot of zeros. Sparse representations only store non-zero elements, saving significant space.
- Encoding Techniques:
- Apply encoding techniques to categorical variables. Techniques like one-hot encoding, label encoding, or more sophisticated methods like target encoding can be used based on the nature of the data.
- Consider using binary or hashing encodings to reduce the size of categorical features, especially when they have high cardinality.
- Data Compression Algorithms:
- Utilize general data compression algorithms (like gzip, LZ4, Snappy) to compress the feature data. These can be particularly effective for data at rest.
- Database and File Format Optimizations:
- Use efficient data storage formats like Parquet or ORC, which offer built-in compression and are optimized for large-scale data processing.
- If you’re using databases, consider options that support on-the-fly compression and decompression.
- Bucketizing:
- For continuous variables, bucketizing (or binning) can be used to reduce the number of unique values by grouping them into bins.
- Feature Hashing:
- The hashing trick can be used for high-cardinality categorical features, mapping them to a lower-dimensional space.
- Distributed Storage:
- If feasible, use distributed storage systems that can scale horizontally. This approach, combined with efficient data formats and compression, can handle large volumes of data without significant compromises in performance.
- Regular Cleanup and Archiving:
- Regularly archive or delete old or unused data. Maintain a clean and efficient database by removing outdated features.
- Efficient In-Memory Representations:
- For the data in use, optimize in-memory representations. Data structures that are memory-efficient can significantly reduce the overall footprint.
- Remember, the choice of strategy should consider not only the space efficiency but also the impact on the system’s performance. Over-compression can lead to loss of information, which might affect the accuracy of the recommender system. Therefore, a balance must be struck between compression and preserving the integrity and usefulness of the data.
-
Here are some common methods to compress features for storage and retrieval in a recommender system:
-
Dimensionality Reduction - Use techniques like PCA, matrix factorization, or autoencoders to reduce feature dimensions. Retain most important information.
-
Quantization - Quantize continuous features into buckets/bins. Can optimize quantization to minimize information loss.
-
Hashing - Use locality sensitive hashing, bloom filters etc. to hash features into lower-dimensional space.
-
Encoding - Use efficient binary encodings like unary, huffman, or delta encoding to compress sparse features.
-
Pruning - Prune least important features based on statistical analysis or model weights.
-
Knowledge Distillation - Train a smaller “student” model to mimic predictions of bigger “teacher” model and use its lower-d features.
-
Product Quantization - Split feature vectors into sub-vectors and quantize each separately.
-
Tied Weights - Use same weights across features to force shared compressed representation when training models.
-
Caching/Chunking - Only store full features for a cache of recent users/items, chunk less frequent ones.
-
Approximate Nearest Neighbor - Use algorithms like LSH, HNSW to compress features for approximate similarity search.
- The goal is to retain the most salient information about features that impact relevance predictions while reducing storage and memory costs. A combination of dimensionality reduction, quantization, encoding, and caching strategies work well in practice.
Tell me Deep and Cross vs Deep and Wide and draw the architecture in ascii, comparative analysis and focus on sparse,dense features and feature crossing
- DCN:
Input -> Embeddings
-> Cross Layers (explicit feature crosses)
-> Deep Layers (implicit crosses)
-> Cross-Stitch Units (combine crosses)
-> Prediction
- Focuses on learning explicit and implicit feature crosses
- Cross layers memorize feature interactions
- Deep layers generalize crosses through non-linearity
- Combines strength of crosses and deep learning
- Specialized for feature crossing
-
Can handle both sparse and dense features
- Wide & Deep:
Input -> Embedding Layer
-> Wide (linear, crosses)
-> Deep (mlp, dense)
-> Concatenate
-> Prediction
- Wide component memorizes crosses
- Deep component generalizes
- Less specialized cross architecture
- Relies on wide component for crosses
- Deep component better for dense features
- Simply concatenates wide and deep
-
Less integrated than DCN
- DCN has a specialized integrated architecture tailored for feature crossing that combines the strengths of explicit cross layers and standard deep layers. Wide & Deep relies more on its wide component for crosses and simply concatenates the wide and deep parts.
Train Validation Test split
- Training Set:
- Purpose: The training set is the largest subset of the dataset and is used to train the machine learning or deep learning model.
- Data Usage: During training, the model learns to make predictions by adjusting its parameters (weights and biases) based on the patterns and relationships present in the training data.
- Labels: The training set typically includes both the input data and the corresponding target labels (ground truth), which the model tries to predict.
- Validation Set:
- Purpose: The validation set, also known as the development set or the holdout set, is used to tune hyperparameters and monitor the model’s performance during training.
- Data Usage: After each training epoch (or a certain number of iterations), the model’s performance is evaluated on the validation set. This helps to determine if the model is overfitting or underfitting the training data and guides the selection of hyperparameters (e.g., learning rate, regularization strength).
- Labels: The validation set also includes both input data and corresponding labels for evaluating the model’s predictions.
- Test Set (Evaluation Set):
- Purpose: The test set is reserved for the final evaluation of the model’s performance after it has been trained and hyperparameters have been selected using the validation set.
- Data Usage: The model is evaluated on the test set only once, and the results are used to assess how well the model generalizes to new, unseen data. It provides an estimate of the model’s performance in real-world scenarios.
- Labels: Like the training and validation sets, the test set includes input data and corresponding labels, but these labels are typically kept hidden during the evaluation phase to assess the model’s predictive ability.
-
Key points to remember:
- The training set is used for training the model and updating its parameters.
- The validation set is used for hyperparameter tuning and monitoring model performance during training.
- The test set is used for a final, unbiased evaluation of the model’s performance on unseen data.
Why you cant tune Hyperparameters on train
- Tuning hyperparameters directly on the training set can lead to several issues, primarily overfitting. Here’s why it’s generally not advisable:
-
Overfitting: When you tune hyperparameters on the training set, the model is adjusted to perform exceptionally well on this specific set of data. However, this often means that it’s learning the noise and specific patterns of the training set, rather than generalizing from the underlying data structure. As a result, while the model may exhibit high accuracy on the training set, its performance on new, unseen data (the test set) is likely to be much poorer.
-
Lack of Generalization: The goal of machine learning is to create models that generalize well to new, unseen data. If hyperparameters are tuned solely on the training data, the model is likely to be too specialized to that particular data and may not perform well on data outside of this set.
-
Biased Model Evaluation: Tuning on the training set makes it difficult to assess the model’s true performance. Since the hyperparameters are optimized for this set, the model’s evaluation metrics might give an overly optimistic view of its effectiveness.
-
Leakage of Test Data Information: Ideally, the test set should be a completely independent dataset used to evaluate the model’s performance. If the hyperparameters are tuned on the training set, and then the model is evaluated on the same set, it’s essentially being tested on data it has already seen, which is not a valid test of its ability to generalize.
-
To avoid these issues, it’s common practice to split the available data into three sets:
- Training Set: Used to train the model.
- Validation Set: Used to tune hyperparameters. This set acts as a stand-in for the test set during model development.
-
Test Set: Used to evaluate the model’s performance after the hyperparameters have been selected. This set should not be used in the training or hyperparameter tuning process.
- This approach, particularly the use of a separate validation set for hyperparameter tuning, helps ensure that the model is both effective and generalizes well to new data.
L1 vs L2
- L1 and L2 are two commonly used types of regularization in machine learning, particularly in the context of linear models like linear regression and logistic regression, though they are also applicable to neural networks. They help to prevent overfitting by penalizing the model complexity. Here’s a comparison of the two:
L1 Regularization (Lasso)
-
Formulation: Involves adding the sum of the absolute values of the coefficients to the loss function. The penalty term is (\lambda \sum w_i ), where (w_i) are the model coefficients and (\lambda) is a hyperparameter that controls the strength of the regularization. -
Effect on Model: Tends to produce sparse models, i.e., models with fewer coefficients. Some of the coefficients can become zero, effectively leading to feature selection.
-
Use Cases: Particularly useful when you suspect that many features are irrelevant or when you want a model that is easy to interpret (since it automatically selects features).
- Limitation: Can be unstable in the sense that small changes in the data can lead to large changes in the model, especially when features are highly correlated.
L2 Regularization (Ridge)
-
Formulation: Adds the sum of the squares of the coefficients to the loss function. The penalty term is (\lambda \sum w_i^2).
-
Effect on Model: Shrinks the coefficients, but it does not set them to zero. This means that no features are ever completely discarded.
-
Use Cases: Useful when most features are relevant or when you have more features than observations. Helps to improve the conditioning of the problem and reduce the variance of the estimates.
-
Limitation: While it reduces the model complexity, it does not perform feature selection and can lead to a model that includes all features.
Key Differences
- Sparsity: L1 can yield sparse models; L2 does not.
- Feature Selection: L1 can perform feature selection; L2 keeps all features but shrinks their coefficients.
- Solution Path: L1 regularization can lead to discontinuous paths as lambda changes (due to features being dropped or added), whereas L2’s solution path is smooth.
- Computation: L2 is computationally easier to solve than L1 due to the differentiable nature of the square function.
Choosing Between L1 and L2
The choice between L1 and L2 regularization depends on the specific problem and data. In practice, it’s common to try both and compare the performance, or use techniques like Elastic Net regularization that combine both L1 and L2 penalties. Elastic Net is particularly useful when there are multiple correlated features, as it maintains the regularization benefits of both L1 and L2.
To Answer
Aishwarya GAIIC interviews NEGIN:
- How do you estimate uncertainty in a model? The confidence scores are not well calibrated generally 2. What are some PEFT methods and how do you increase context length in LLMs
- What is the difference between Tree of thought prompting and chain of thought prompting? Which is better and why? 4. What happens in a mixture of experts model?
- What is mode collapse in GANs? What loss functions are used in GANs generally?
- What does the “stable” in stable diffusion refer to?
- If you have a HD image that can make vision models run out of memory, how do you preprocess it? 8. What is the difference between DDPM and DDIM?
- Generally, how do you know if the model is performing well on data? What kind of errors are used? 10. Explain BERT, GPT-3 and T5 and how all of these models are similar/different?
- How to identify if a model is hallucinating? How to mitigate hallucination
- What are some hierarchical methods to reduce image size for a model to consume
- How do you semantically measure if 2 pieces of text are similar? Not BLEU, ROUGE or n-gram metrics. How do you calibrate this?
- What are some transformer specific regularization methods? RAG questions:
- What is RAG? Why do we need it?
- Does the number of documents make a difference to the RAG model accuracy?
- Assume I provide a context and question to an LLM, does it matter where the answer is in the context? In the beginning, middle or end? Answer here:https://arxiv.org/abs/2307.03172 Design:
- Say you intend to design a text to SQL model for a company, how would you go about doing it? 2. Follow ups: a. How do you deal with follow-up questions from the user? (preserve context) b. How can you prompt your LLM to perform this task in a zero-shot manner? DEIGO:
- In the broad picture what do ML models do? Why do we need them?
- What is the need for DL models? Explain traditional ML models and cases where they would fail 3. Why should you make inductive biases in models? What can’t we look at the whole search space? 4. How do you know if a model in production is performing well? What insights can you gain from the data and predictions?
- Explain some ways of visualizing data in low dimensions
- What is curriculum training? What does it do to the loss surface?
- Why were RNNs introduced? How are LSTMs different and what issue do they solve? 8. How are loss functions chosen based on a problem?
- How does attention in transformers work? What is their complexity? Methods to reduce attention complexity 10. How do you prevent models from overfitting on to train data? How to quantify them?
- Why do ensemble models perform better than regular models? Is dropout a form of ensembling? 12. Some walk through questions on my project in Alexa
- How does RAG work?